Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Тяговые свойства асинхронного тягового двигателя.
|
|
В асинхронном тяговом двигателе (АТД) используется взаимодействие вращающегося магнитного поля статора с током, наведенным этим полем в обмотке ротора. Вращающий момент асинхронного ТД описывается следующей формулой:
 ,
,
где С – постоянная, зависящая от параметров двигателя;
U 1 – питающее напряжение;
s – абсолютное скольжение ротора (разность частоты питающего напряжения и частоты вращения ротора);
f 1 – частота питающего напряжения.
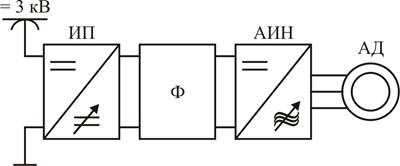
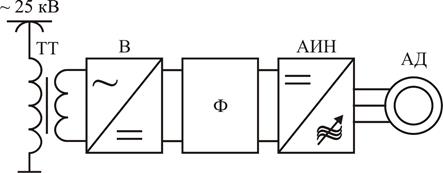
Для питания АТД на ЭПС постоянного тока необходимо иметь автономный инвертор напряжения или тока. На ЭПС переменного тока кроме автономного инвертора необходим выпрямитель. И выпрямитель и инвертор могут быть объединены в одном полупроводниковом устройстве – преобразователе числа фаз (ПЧФ). На современном этапе развития силовой полупроводниковой техники выгоднее на ЭПС постоянного тока дополнительно иметь входной импульсный преобразователь для регулирования величины напряжения, подводимого к ТД.
Т.к. нагрузка ТД в эксплуатации может изменяться в широких пределах, то имея сложную многофункциональную систему управления важно и должно соблюдать условия, при которых ТД работает в наиболее экономичном режиме:
D Р min = (D Р м + D Р с + D Р 2) = const.
В первом приближении считают, что механические D Р м и магнитные D Р с потери в двигателе не зависят от нагрузки, т.е. от тока ротора. Потери в роторе
D Р 2 = М × (w1 – wвр),
где w1 – угловая частота вращения магнитного поля статора;
wвр – угловая частота вращения ротора.
Рассмотрим, при каком условии потери минимальны. Так как мы условились, что потери механические и магнитные не зависят от нагрузки, то условие минимума потерь сводится к минимуму потерь в роторе:
 ,
,
где р – число пар полюсов обмотки статора;
f вр – частота вращения ротора;
f 2 – частота тока обмотки ротора.
Следовательно, условие
D Р min = const
преобразуется в условие
f 2 min = (f 1 – f вр)min = const.
Для выявления способов реализации этого условия рассмотрим два произвольных режима работы двигателя. Допустим, что в первом режиме статор питается напряжением U 1 с частотой f 1, а в другом – соответственно U 1' и f 1'. Относительное скольжение ротора в этих режимах равно:
 .
.
Вращающий момент в этих режимах будет соответственно равен:
 .
.
Найдем соотношение моментов в этих режимах при условии
f 1 – f вр = f 1' – f вр' = const:
 .
.
Отсюда
 .
.
Этот закон оптимального частотного управления асинхронным двигателем был сформулирован М.П.Костенко в 1925 г. Из этого выражения следует, что оптимальный режим работы асинхронного двигателя определяется соотношением трех его параметров – напряжения и частоты питающего напряжения, а так же вращающего момента. Изменяя соотношение этих составляющих таким образом, чтобы соблюдалось условие минимума потерь т.е. условие работы с максимальным КПД и cosj. При больших нагрузках следует учитывать падение напряжения в обмотке ротора и для получения наилучших показателей вносить коррективы в закон регулирования. С этой целью на ЭПС применяется система автоматического регулирования режимов работы АТД.
Поскольку для электрической тяги удобнее иметь выражение закона регулирования не от частоты питающего напряжения и момента, а от скорости и силы тяги, то выражение закона Костенко преобразуется следующим образом:
 .
.
Выражение получено с допущением, что на рабочей части характеристики скорость движения пропорциональна частоте питающего напряжения без учета скольжения:
 ,
,
а сила тяги, как известно, пропорциональна вращающему моменту без всяких допущений:
 .
.
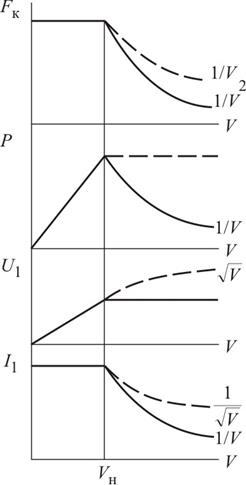
Для ЭПС наиболее характерен следующий закон регулирования: до скорости выхода на номинальную характеристику поддерживается постоянство силы тяги, а затем – постоянство мощности.
Постоянство силы тяги означает постоянство вращающего момента. Вращающий момент определяется взаимодействием магнитного потока статора и тока ротора, приведенного к обмотке статора (I 2'). Следовательно, постоянство вращающего момента равносильно I 2' = const. Ток статора можно представить как сумму векторов тока намагничивания и тока ротора, приведенного к обмотке статора:
 .
.
Следовательно, постоянство тока ротора равносильно постоянству тока статора и закон регулирования при постоянстве силы тяги будет выглядеть следующим образом:
 .
.
Т.е. для поддержания постоянной силы тяги необходимо с ростом скорости повышать напряжение питания, пропорционально скорости или частоте питающего напряжения.
После выхода на номинальную характеристику целесообразно поддерживать постоянной мощность двигателя. Поскольку
 ,
,
то
 .
.
Следовательно
 .
.
Иными словами, для поддержания постоянства мощности необходимо с ростом скорости изменять питающее напряжение пропорционально корню квадратному из его частоты. Рост питающего напряжения требует более мощной изоляции обмотки статора, и, следовательно, приведет к увеличению габаритных размеров ТЭД.
В случае реализации закона постоянства питающего напряжения мощность и ток статора будет изменяться обратно пропорционально скорости движения, а сила тяги – обратно пропорционально квадрату скорости:
 ; Þ
; Þ  .
.
 ; Þ
; Þ  .
.
Так как в этом случае сила тяги падает слишком интенсивно, рационально реализовать гибридный закон регулирования: при достижении максимальной мощности напряжение питания еще не достигает своего максимального значения. Реализуется режим постоянства мощности. При достижении напряжением питания максимума – режим постоянства питающего напряжения.
Логично предположить, что система автоматического управления способна реализовать алгоритм поддержания постоянной скорости движения. Как следует из формулы, постоянство скорости соответствует постоянству частоты питающего напряжения. В этом случае
 ,
,
т.е. при постоянной скорости движения необходимо изменять питающее напряжение пропорционально корню квадратному из силы тяги.
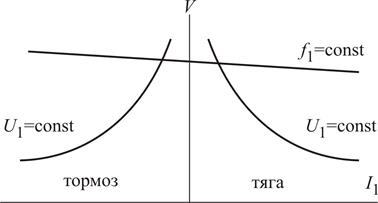 Таким образом, одним из достоинств асинхронного ТД является возможность с помощью системы управления реализовывать различную жесткость характеристик: при постоянстве частоты реализуется жесткая характеристика (хороша при необходимости использовать максимальную силу по условиям сцепления), при постоянстве напряжения – мягкую.
Таким образом, одним из достоинств асинхронного ТД является возможность с помощью системы управления реализовывать различную жесткость характеристик: при постоянстве частоты реализуется жесткая характеристика (хороша при необходимости использовать максимальную силу по условиям сцепления), при постоянстве напряжения – мягкую.
Максимальную частоту питающего напряжения выбирают исходя из максимальной скорости движения ЭПС и параметров ТД и тяговой передачи:
 .
.
Минимальную частоту выбирают из условия трогания с места при условии, что ТД реализует силу тяги, превышающую номинальную на 30…50% при минимальном токе статора.