Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Процессы управления, сопровождающиеся вынужденными вибрациями
|
|
 (6.8)
(6.8)
где  , a f(t) — медленное по сравнению с
, a f(t) — медленное по сравнению с  воздействие, т. е. спектр возможных частот изменения f(t) много меньше ω. Решение будем искать в виде
воздействие, т. е. спектр возможных частот изменения f(t) много меньше ω. Решение будем искать в виде

 (6.9)
(6.9)
где  —тоже медленная по сравнению с x*(t) функция времени, определяющая процесс управления при наложенных на него вынужденных вибрациях х*.
—тоже медленная по сравнению с x*(t) функция времени, определяющая процесс управления при наложенных на него вынужденных вибрациях х*.
 (6.10)
(6.10)
Для медленных составляющих (процесс управления) имеем
 (6.11)
(6.11)
а для вибрационных составляющих
 (6.12)
(6.12)
 (6.13)
(6.13)
 (6.14)
(6.14)

 (6.15)
(6.15)
Но согласно (6.13) имеем
 (6.16)
(6.16)
а согласно (4.16)
 (6.17)
(6.17)
 Рис. 6.8.
Рис. 6.8.

где  — коэффициент усиления нелинейности в процессе управления, определяемый по формуле (6.18). Например, для идеальной релейной характеристики (см. раздел 4.2)
— коэффициент усиления нелинейности в процессе управления, определяемый по формуле (6.18). Например, для идеальной релейной характеристики (см. раздел 4.2)
получим
F(x) = csignx 
Получим
где  — амплитуда симметричных вынужденных колебаний в данной системе, найденных согласно раздела 6.1.
— амплитуда симметричных вынужденных колебаний в данной системе, найденных согласно раздела 6.1.
Для релейных характеристик с зоной нечувствительности и с петлей, дифференцируя (4.31), находим
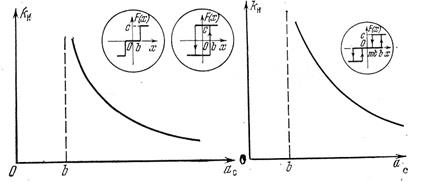
Рис.6.9. Рис.6.10.
На рис. 6.9 представлена зависимость коэффициента от амплитуды симметричных вынужденных колебаний.
Аналогично для релейной характеристики общего вида (рис. 6.10) получаем
Для кусочно-линейной характеристики с зоной нечувствительности (рис. 6.11) имеем
а для характеристики с насыщением (рис. 6.12)
 (ac ≥ b)
(ac ≥ b)
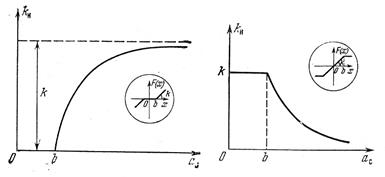
Рис.6.11. Рис.6.12.

