Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Механика ЭП
|
|
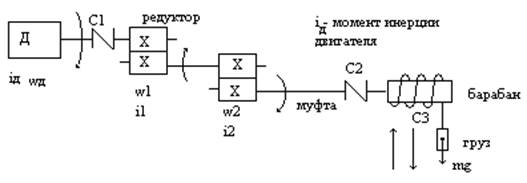
При проектировании ЭП осуществляется приведение моментов и усилий к валу ЭД, это необходимо для силового расчета и правильного выбора двигателя (по P и υ)
Приведение моментов и сил осуществляется из уравнения баланса мощностей на валах механизма.
η – кпд каждого из узлов механизма
ι к – коэффициент передачи
Мс – момент статической нагрузки на валу ЭД
Мсм - момент статической нагрузки на валу исполнительного механизма
ι =ω 2/ω 1 – коэф – нт передачи редуктора
V/ω =Р – радиус приведения
Fc – стат. Усилия на валу двигателя
Fсм – стат. Усилия на валу механизма
Эти формулы справедливы для приведения моментов (статических) и сил.
привеДЕНИЕ динамических моментов
Запишем выражение, равносильное предыдущему:

in – коэф-нт передачи мех-ма (передат-ое число)
 - момент инерции двигателя (из справочника)
- момент инерции двигателя (из справочника)
Маковый момент двигателя 
G – вес ротора
Д – диаметр
Коэф-нт жесткости элемента схемы опред-ся отношением изменения угла момента к изменению угла закручивания:

 = Mдвиг + Mсопр
= Mдвиг + Mсопр
Для жесткости С имеется ф-ла приведения:

Суммарная (жес) привед-ая С системы равна
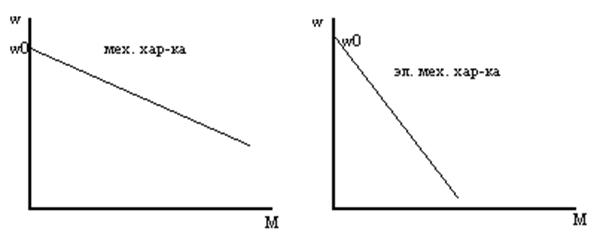
Механические характеристики ЭД
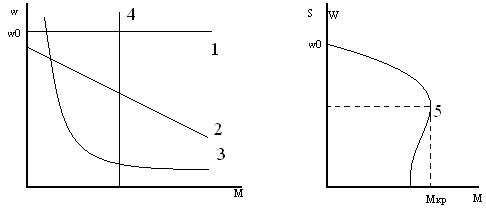
Мех. хар-ка это зависимость w = f(M)
1. хар-ка синхронного двигателя
2. хар-ка дв. постоянного I независимого возбуждения
3. хар-ка дв. постоянного I последовательного возбуждения
4. хар-ка дв. постоянного I независимого возбуждения при питании от источника тока
5. хар-ка асинхронного дв.
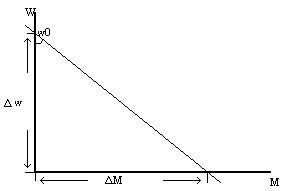
Для описания хар-ки входит понятие жесткости:
 - для линейных хар-к
- для линейных хар-к
 - для нелинейных хар-к
- для нелинейных хар-к
Жесткость это коэф-нт наклона прямой(отношение катетов  )
)


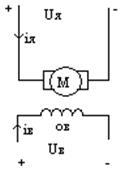
Электромеханические св-ва двигателя.
Статические хар-ки ДПТНВ
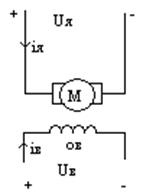 Запишем систему уравнений:
Запишем систему уравнений:
 Uя = Rяiя+iя
Uя = Rяiя+iя  +e
+e
Mя = kФiя
Rя – актив.сопр.обмотки якоря
Rя = Rяд + Rдп + Rко
Lд = Lяд + Lдп + Lко – для индуктивности
e = kФ*ω;
kФ – конструктивный коэф-нт
ω – угловая ск-ть
е – эдс якоря
Для перехода к статическому режиму(установившемуся), т.е. берем производные
 =
=  = 0
= 0
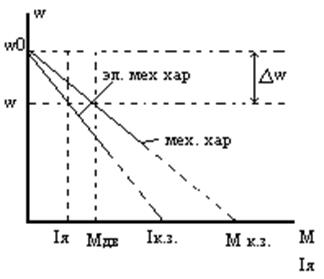
 - эл. мех. хар-ка
- эл. мех. хар-ка
 - мех. хар-ка
- мех. хар-ка
Хар-ки отличаются коэф-том пропорциональности kФ = 1, 12 – 1, 18
M = kФIя – переход от одной хар-ки к другой.
 - коэф-нт жесткости для мех. хар-ки
- коэф-нт жесткости для мех. хар-ки

M = β (ω 0 - ω) – для мех. хар-ки
Естественные статические хар-ки для ДПТНВ
Под естественной хар-ми понимают хар-ки двигателя соответствующие номинальному режиму работы:
 Uя = Uяном; Rдоб = 0
Uя = Uяном; Rдоб = 0
Iя = Iяном; Rяц = Rя нач. условия
Ф = Фном;
Запишем урав. для мех. и эл. мех. хар-к
 Эл мех
Эл мех
 мех
мех
 Iк.з. =
Iк.з. = 
Δ ω – разница скоростей, яв. ошибкой системы или статизмом(Δ ω = ω 0 - ω)
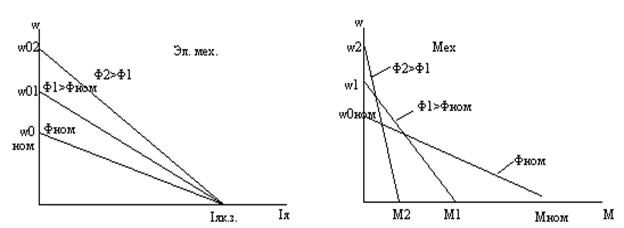
Искусственные статические характеристики ДПТНВ
1 Случай:
Uя = var
Rдоб = 0

где RΣ = Rя + Rдоб = 0
 при замене полярности Uя < 0
при замене полярности Uя < 0
для построения Rдоб2
Прямая хар-ка без Rдоб;
Наклон за счет Rдоб,
меняем жескость
2 случай:
 Uя = const
Uя = const
Rдоб = var
RΣ = Rя + Rдоб
Запишем выражения:

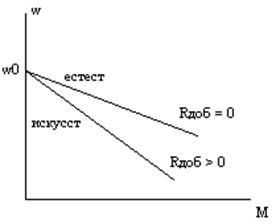
При введении Rдоб. В цепь якоря жескость хар-ки уменьшается.
3 случай
Ф = var
Rдоб = const
Uя = const
RΣ = Rя + Rдоб = const
w – ск-ть х.х.
Режим работы ДПТНВ
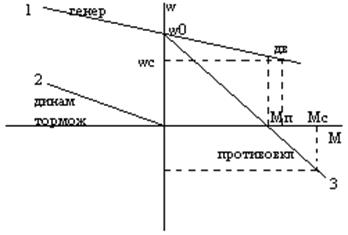
1 Если ск-ть дв начинает возрастать и превышать ск-ть х.х., то двигатель переходит в генераторный режим. И дв. Начинает отдавать энергию в сеть.
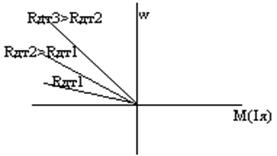
2 Режим динамического торможения:
Ставим динам. торможение и дв. работает как генератор(работает на нагрузку)
3 Если в цепь якоря ввести достаточно большое сопротивление, при этом пусковой момент дв. станет меньше момента статической нагрузки и под действием раб. машины дв. начнет вращаться в обратном направлении – режим противовключения, с точки зрения темп. раб. данный режим самый тяжелый для Дв.
Применяют как отдельные виды торможения, так и в совокупности.
Обмотка возб. наводит магн. поток в Дв., в котором вращается якорь, при этом, ЭДС якоря сохраняется и при её воздействии через Rдт, через неё начинает протекать ток. Поток якоря будет взаимодействовать с обмоткой возбуждения будет возникать тормозной момент.
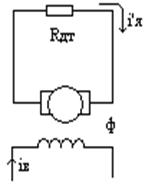
Изменяя Rдт можно менять хар-ки