Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Режимы работы ДПТПВ
|
|
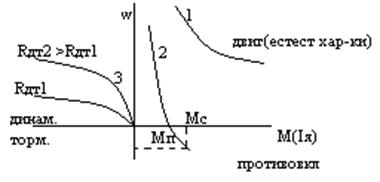
1 Двигательный режим
2 Режим противовключения возможен когда Мпуск< Мстат.нагр
3 Динамическое торможение осуществляется отключ. Дв. от сети и замыкаем сопротивления.
 Мдв = kФIя = (-kФ)(-Iя)
Мдв = kФIя = (-kФ)(-Iя)
Динамические св-ва ДПТПВ
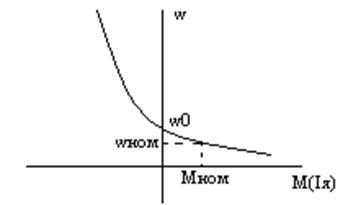
Статические хар-ки ДПТПВ нелинейны и соответственно при изменении режима работы дв. его коэф-нт передачи будет меняться.
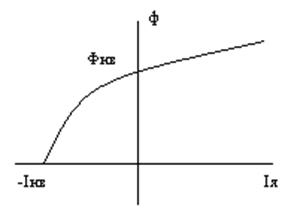
Нелинейность дв. будет обусловлена зависимостью потока возбуждения от тока якоря. Для исследования динамических св-в дв., обычно используют линаризацию кривой намакничивания.

структурная схема:
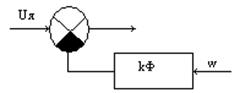

где kФ – коэф-нт пропорциональности между потоком и током якоря на участке линиаризации;
 ; Ф;
; Ф;  - координаты точек линиаризации;
- координаты точек линиаризации;
Rя – общее активное сопротивление якорной цепи Дв.
 ;
;  - Эл магн постоянная времени обмотки возбуждения и якоря дв
- Эл магн постоянная времени обмотки возбуждения и якоря дв
Особенности статических хар-к двигателей смешанного возбуждения.
Счема замещения:
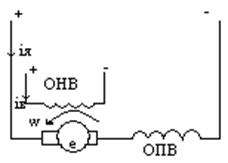
ОНВ – об незав возб
ОПВ – об послед возб
На ОНВ подается питающее напряжение и в дв. возникает магн. поток возбуждения ниже ном. значения:
Ф< Фном При подачи питающего напряжения на якорь в роторе дв. и ОПВ будет протекать ток якоря, тогда магн. поток увеличится до МАХ значения
 Ф=Фmax
Ф=Фmax
тогда кривая намагничивания имеет след. вид
Фнв = (0, 6 -0, 8)Фном
Фном = Фнв + Фпв
 - Эл. мех. хар-ка
- Эл. мех. хар-ка
 - мех. хар-ка
- мех. хар-ка
где Ф(Iя) – магн. поток соответствующий току якоря.
 мех. или эл. мех. хар-ки для данных выражений
мех. или эл. мех. хар-ки для данных выражений
где  - ск-ть х.х.
- ск-ть х.х.
 - ск-ть х.х.
- ск-ть х.х.
Достоинства: высокая перегрузочная способность λ = 2, 5 – 3, 0 (коэф-нт перегрузки)
 - коэф-нт перегрузки
- коэф-нт перегрузки