Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Режим работы ДПТПВ
|
|
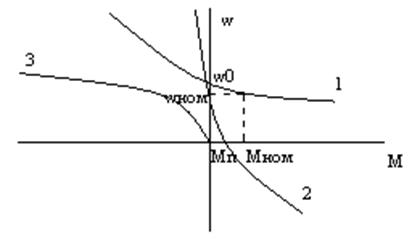
1 Двигательный режим
2 Режим противовключения
3 Режим динамического орможения
3 режим осуществляется при включенной обмотки НВ и при шунтировании ОПВ.
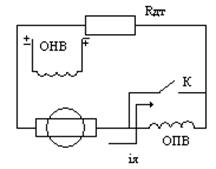 Схема динамического торможения
Схема динамического торможения
динамическое для такого дв нерационально, т.к. дв до нулевой ск-ти
не останавливается и требуется переключения полярности ОНВ.
генераторный режим
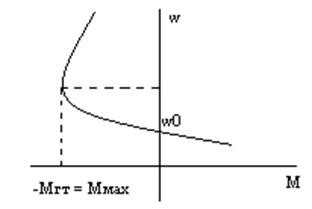
Осуществление ГТ нецелесообразно, т.к.
при определенной ск-ти тормозной
момент достигает max а при дальнейшем
увеличении ск-ти, тормозной момент
уменьшается т.е. стремиться к нулю.
ГТ режим генераторного торможения
При ск-ти >  ток якоря меняет свое направление и ОПВ дйствует встречно с ОНВ, следовательно магн. поток Фном = Фнв – Фпв, в результате чего поток возбуждения двигателя уменьшается, а следовательно уменьшается тормозной момент.
ток якоря меняет свое направление и ОПВ дйствует встречно с ОНВ, следовательно магн. поток Фном = Фнв – Фпв, в результате чего поток возбуждения двигателя уменьшается, а следовательно уменьшается тормозной момент.
Mторм = kФIя
Статические хар-ки асинхронного двигателя
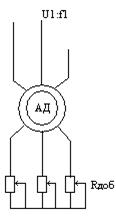 на статор подается питающее напряжение и в обмотке возникает вращающее эл. магн. поле, это поле пересекает ротор и в нем возникает ЭДС а следовательно и ток.
на статор подается питающее напряжение и в обмотке возникает вращающее эл. магн. поле, это поле пересекает ротор и в нем возникает ЭДС а следовательно и ток.
поле статора вращается со 
f1 – частота питающей сети
Р – число пар полюсов
с фазным ротором т.к. включен. сопр.
Поле ротора отстает от поля статора на величину скольжения S:

Для исследования АД используют схему замещения.
При этом допускается:
1 Фазы двигателя симметричны, т.е. актив. и индуктив. сопротивления равны
т.е.Ra = Rb = Rc, La = Lb = Lc.
2 Питающее напряжение двигателя представляет собой sin-ую форму.
3 Индуктивность обмоток независит от изменения тока.
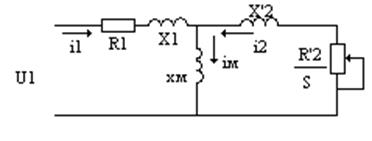
R1 - активное сопротивление статора
x1 - индуктивное сопротивление статора
R’2 – активное приведенное сопротивление ротора
X’2 – индуктивное приведенное сопротивление ротора
Xμ - индуктивное сопротивление цепи намагничивания
преобразуем схему замещения
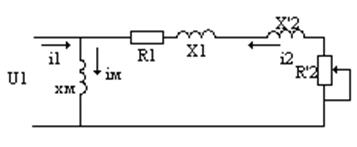
 - ток ротора
- ток ротора
 - полное сопротивление схемы замещения
- полное сопротивление схемы замещения
где Хк – идуктивное сопротивление к.з. двигателя
 - мощность переданная через воздушный зазор
- мощность переданная через воздушный зазор

 - мощность на валу двигателя
- мощность на валу двигателя



 , т.е.
, т.е.
 ;
;