Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамические св-ва ДПТНВ
|
|
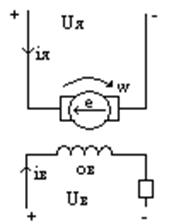
Запишем систему уравнений для цепи возбуждения:
 Uв = Rвiв + Lв
Uв = Rвiв + Lв 
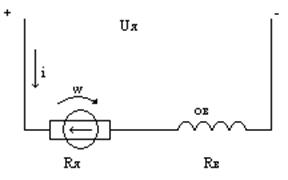
Для якорной цепи
Uя = Rяiя + Lя 
M = kФiя – для момента
Заменим  - оператор Лапласа
- оператор Лапласа
 Uв = Rвiв + LвPiв = Rв(1 +
Uв = Rвiв + LвPiв = Rв(1 +  ) iв
) iв
Uя = Rяiя + LяPiя + е = Rяiя(1 +  ) kФω
) kФω
M = kФiя
где e = kФω
 ;
;  - эл. магн. постоянная времени
- эл. магн. постоянная времени
 Uв = RвIв(1 + Tв P)
Uв = RвIв(1 + Tв P)
Uя = RяIя(1 + Tя P)+kФω
M = kФiя
По данной системе уравнений можно составить структурную схему
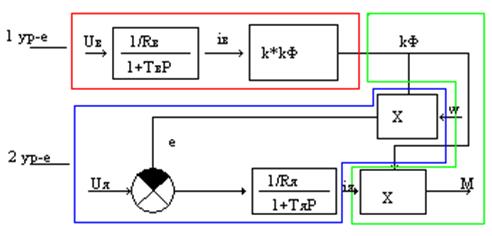

____3 ур-е
При Ф = var, и питании от ИН(ист. напр.)
На входе системы: Uв; Uя; ω
На выходе системы: M
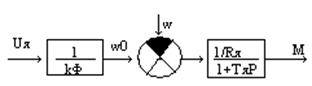
При Ф = const первое ур-е отпадает, а второе ур-е приводим к виду:
(1 + Tя P) M = β (ω o - ω)
Если Дв питается от ИТ(ист тока), то он управляется лишь обмоткой возбуждения.
(1 + Tя P) M = 
Где Iя1 – заданной значение тока якоря для соответствующего режима работы.

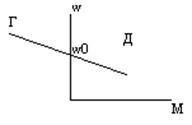
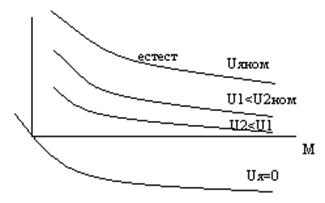
Искусственные статические хар-ки ДПТПВ
 1 случай
1 случай
Uя = var
Семейство искусственных кривых
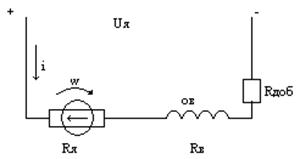
2 случай
Rдв = var
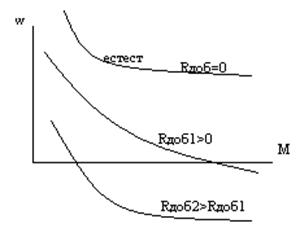
При добавлении Rдоб хар-ки кривых становятся более мягче.
Данные св-ва используют для управления двигателем, как в отдельности, так и в совокупности.
ДПТПВ нельзя оставлять без нагрузки, т.к. ск-ть х.х. стремится к бесконечности.
В этом двигателе нет генераторного режима, т.к. ω 0 = 
При переходе через ω 0 двиг. Режим должен перейти в генераторный, но не переходит, т.к. ω 0 =