Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Основы динамики электропривода
|
|
Поскольку периоды разгона и торможения электропривода не являются эффективным временем работы механизма, их длительность желательно по возможности сокращать, что особенно важно для привода механизмов, работающих с частыми пусками и остановками.
 Продолжительность переходных процессов привода определяется интегрированием уравнения движения электропривода. Разделив переменные, получим для периода пуска
Продолжительность переходных процессов привода определяется интегрированием уравнения движения электропривода. Разделив переменные, получим для периода пуска
откуда

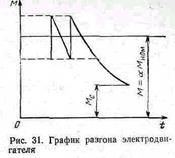
где J — момент инерции, приведенный к валу двигателя. Для решения этого интеграла необходимо знать зависимость моментов двигателя и механизма от скорости. Текущее значение момента двигателя при реостатном пуске заменим средним его значением М=α Мном, как это показано на рис. 31. Тогда для простейшего случая пуска при условии, что Mc=const, получим следующее выражение для времени пуска от состояния покоя (ω 1=0) до конечной угловой скорости (ω 2= ω ном), соответствующей статическому моменту Мc:

Время торможения определится из выражения

Из уравнения видно, что теоретически угловая скорость достигнет своего установившегося значения только через бесконечно большой промежуток времени (при t =∞). В практических же расчетах считают, что процесс разбега заканчивается при угловой скорости, равной не установившемуся ее значению ω = ω с, а при ω =(0, 95÷ 0, 98)ω с. Из уравнения следует, что уже при t= 3Тм ω =0, 96 ω 0, т. е. переходный процесс практически будет закончен за время t= (3÷ 4)Tм.
Поскольку пуск двигателей постоянного тока и асинхронных с фазным ротором часто осуществляется через многоступенчатый Реостат, необходимо уметь вычислять время разбега двигателя на каждой ступени.
Для ступени х уравнение может быть переписано в виде

М = Мс + (Мк - Мс) е, (33)
где: Мк—номинальный момент при пуске; tx — время разбега двигателя на рассматриваемой ступени; Тмх — электромеханическая постоянная времени для этой же ступени.

где ω хн — угловая скорость на ступени х при М=М, ном.
Решая равенство (33) относительно времени пуска и учитывая равество (27), находим

Где: ω х—угловая скорость на ступени х при М=Мк; ω х+1 —то же, на ступени х+ 1 при М=Мк; ω хс — то же, на ступени х при M=Мс.
Время разбега на естественной характеристике te теоретически равно бесконечности. При расчетах же его принимают равным (3÷ 4)Тм.е. Общее время разбега двигателя при пуске равно суммарному времени разбега на всех ступенях.
Время торможения электропривода определяется также реше-нием основного уравнения движения.
Замедление привода происходит в том случае, если динамический момент имеет отрицательное значение или когда вращающий момент двигателя меньше статического момента сопротивления
Для торможения противовключением, когда угловая скорость изменяется от ω = ω 1 до ω =0, уравнение (27) может быть переписано в виде
где
 М1 и ω 1 — соответственно момент и угловая скорость двигателя в начале торможения; ω с — угловая скорость, соответствующая моменту Мс на заданной механической характеристике.
М1 и ω 1 — соответственно момент и угловая скорость двигателя в начале торможения; ω с — угловая скорость, соответствующая моменту Мс на заданной механической характеристике.
Время торможения от ω 1 до полной остановки составит
При динамическом торможении от w=w1 до w=0
где

Время реверсирования можно рассматривать как сумму времени торможения и разбега в обратном направлении.
Основным уравнением, описывающим работу системы электропривода, является уравнение движения. Пользуясь этим уравнением, можно произвести анализ переходных процессов, вычислить время разгона и торможения, определить расход энергии и т. д.
Решив уравнение движения электроприводов относительно угловой скорости ω или вращающего момента двигателя М для простейшего случая, когда Mc = const, механическая характеристика двигателя линейна, получим уравнение переходного процесса привода

или

где Mс и ω с — статический момент и соответствующая ему угловая скорость; Мнач и ω нач — соответственно момент двигателя и угловая скорость в начале переходного режима; t — время, прошедшее от начала переходного режима; Тм —электромеханическая постоянная чая времени.
Электромеханической постоянной называется время, в течение которого привод с приведенным моментом инерции J разгоняется вхолостую из неподвижного состояния до угловой скорости идеального холостого хода ω о при неизменном вращающем моменте, равном моменту к.з. Мк (или начальному пусковому моменту) двигателя. С увеличением величины Тм растет время переходных процессов и, как следствие, снижаются производительность и экономичность работы машины
Электромеханическая постоянная времени может быть определена ленаиз следующего выражения:

где: shom=(ω 0—ω ном)/ω о—скольжение (для асинхронного двигателя) или относительный перепад скорости (для двигателя постоянного тока параллельного возбуждения) при работе на искусствен ной характеристике при номинальном моменте на валу двигателя; Mк —начальным пусковой момент двигателя (момент к.з.).
 Из уравнении (27) и (28) следует, что при линейной механической характеристике двигателя и постоянном статическом моменте изменение угловой скорости и момента, развиваемого двигателем, происходит по экспоненциальному закону. В частном случае, когда пуск двигателя совершается под нагрузкой из неподвижного состояния (ω нач=0), уравнение (27) принимает вид
Из уравнении (27) и (28) следует, что при линейной механической характеристике двигателя и постоянном статическом моменте изменение угловой скорости и момента, развиваемого двигателем, происходит по экспоненциальному закону. В частном случае, когда пуск двигателя совершается под нагрузкой из неподвижного состояния (ω нач=0), уравнение (27) принимает вид

и при пуске вхолостую, когда Мc= 0,

На рис. 30 изображен процесс нарастания угловой скорости движения согласно уравнению (27). Постоянная времени определяется из графика отрезком на прямой, отсекаемым касательной, проведенной из начала координат к кривой ω = f(t)
Лекция 7. Основы выбора электродвигателей.
В производственных условиях нагрузка на двигатель зависит от величины нагрузки механизма и характера изменения ее во времени.
Закономерность изменения статической нагрузки во времени обычно.изображается в виде диаграмм, которые называются нагрузочными диаграммами механизма. На основании нагрузочных диаграмм механизма строятся нагрузочные диаграммы двигателя, в которых учитываются статистические и динамические нагрузки.
 Так как нагрев двигателей в основном происходит за счет потерь электроэнергии в обмотках двигателя, а при различных нагрузках величина тока в обмотках различна, то и температура
Так как нагрев двигателей в основном происходит за счет потерь электроэнергии в обмотках двигателя, а при различных нагрузках величина тока в обмотках различна, то и температура
обмоток двигателя будет зависеть от нагрузочных диаграмм.
Нагрузочные диаграммы электродвигателей делятся:
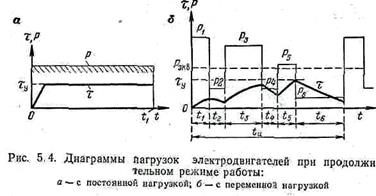
по характеру изменений величины нагрузки во времени — на диаграммы с постоянной и переменной нагрузкой (рис. 5.4);
по продолжительности нагрузки — на диаграммы с продолжительной, кратковременной, повторно-кратковременной и перемежающейся нагрузкой.
В соответствии с таким делением нагрузок принято различать четыре основных режима работы двигателей с постоянной и переменной нагрузкой: продолжительный, кратковременный, повторно-кратковременный, перемежающийся.
В каждом двигателе имеются токоведущие части, изолированные изоляцией. Изоляция, не меняя своих параметров, выдерживает только определенную температуру. Эта температура и есть предельная (допустимая) температура, до которой может нагреваться двигатель. Если двигатель будет нагружен так, что его τ у будет выше τ д, — он выйдет из строя.
Конечная температура электродвигателя τ н слагается из превышения его температуры над температурой окружающей среды и температуры окружающей среды (для средней полосы СССР она принята 308 К). Учитывая это положение, следует сделать вывод, что в характеристиках двигателей указана мощность для окружающей среды с температурой 308 К. При изменении температуры окружающей среды можно, в определенных пределах, менять и нагрузку на двигатель против его паспортной мощности.
Допустимые температуры нагрева обмоток двигателей ограничиваются свойствами различных классов изоляции, а именно:
класс У, τ д =363 К — непропитанные хлопчатобумажные ткани, пряжа, бумага и волокнистые материалы из целлюлозы и шелка;
класс А, τ д = 378 К—те же материалы, но пропитанные жидким диэлектриком (маслом, лаком) или опущенные в трансформаторное масло;
класс Е, τ д = 393 К—синтетические органические пленки, пластмассы (гетинакс, текстолит), изоляция эмалированных проводов на основе лаков;
класс В, τ д = 403 К—материалы из слюды, асбеста и стекловолокна, содержащие органические вещества (миканит, стеклоткань, стеклотекстолит) и некоторые пластмассы с минеральным наполнением;
класс F, τ д = 428 К—те же материалы в сочетании с синтетическими связующими и пропитывающими веществами повышенной теплостойкости;
класс Н, τ д = 453 К—те же материалы в сочетании с кремнийорганическими связующими и пропитывающими веществами, а также кремнийорганическая резина;
класс С, τ д более 453 К — слюда, электротехническая керамика, стекло, кварц, асбест, применяемые без связующих составов или с неорганическими связующими составами.