Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Двигатели ПТ с вентильным (тиристорным) управлением
|
|
Вентильные преобразователи используются для управления угловой скоростью ДПТ. наиболее близкий по свойствам вентиля является выпрямительный диод. РИСУНОК
Управляемый полупроводниковый диод (тиристор) проводит ток в прямом направлении лишь при наличии управляющего сигнала. В противном случае он заперт. РИСУНОК
Применение вентильных преобразователей позволило создать безконтактные двигатели ПТ, в которых щеточно-коллекторный узел заменен надежной полупроводниковой схемой. В коллекторных малоинерционных ДПТ они используются для преобразования переменного входного напряжения в постоянное, а также в схемах стабилизации угловой скорости, что позволяет получить коммутацию без искрения. Это позволяет увеличить срок службы щеток в 2-3 раза и получить стабильные характеристики. Системы ЭП ПТ ПР являются реверсивными. В двигателях с возбуждением от ПМ для получения реверса необходимо изменить направление тока в цепи якоря Д. это достигается двумя способами: 1. используется один комплект тиристоров с включением в главную цепь переключателя (реверсора)
2. с использованием двух комплектов тиристоров, каждый из которых пропускает ток в определенном направлении.
Существуют разновидности схем включения двухкомплектных тиристорных преобразователей. Рассмотрим схему со встречнопараллельным включением тиристоров. Для ограничения скорости нарастания тока в цепи якоря Д включают индуктивность. Сх имеет следующий вид РИСУНОК. Тиристорный преобразователь является сложным нелинейным импульсным элементом. Его выходное напряжение имеет нестандартную форму. С точки зрения динамики его модель довольно сложна. В некоторых случаях тиристорный преобразователь можно рассматривать относительно угловой скорости как апериодическое звено с передаточной функцией.  , где Кп-коэффициент усиления преобразователя, Тп-постоянная времени.
, где Кп-коэффициент усиления преобразователя, Тп-постоянная времени.
19.Датчики положения: потенциометрические датчики, вращающиеся трансформаторы, резольвер, индуктосин, сельсин.
Для следящих приводов робота для измерения положения используют аналоговые и цифровые датчики. Для измерения положения(угла) в ПР обычно используются: аналоговые(потенциометрические датчики, вращающиеся трансформаторы, резольверы, индуктосины). эти датчики относятся к аналоговым датчикам, а кодовые и импульсные – к цифровым датчикам. Из индукционных датчиков широко используются вращающиеся трансформаторы и сельсины.
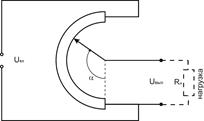
Потенциометрические датчики: Они преобразуют угловое движение aдвиж в выходное напряжение. На выводы потенциометра подается постоянное или переменное напряжение. В потенциометрических датчиках используются проволочные или пленочные потенциометры. Статическая характеристика Uвых=f(a)-зависимость выходного напряжения от положения-нелинейна. Нелинейность тем выше, чем выше b=Rн/R, где Rн-активное сопротивление нагрузки, R-сопротивление потенциометра. Чувствительность потенциометрического датчика – 3..5 ·10-3 В/мм. Точность проволочных датчиков может составлять 0, 05%. Их недостаток из-за дискретного изменения сопротивления при перемещении щетки движка получается ступенчатая характеристика. Для обеспечения стабильности работы датчики должны иметь сопротивление R больше 1000 Ом. Стабильность характеризуется температурным коэффициентов.
Вращающиеся трансформаторы -это электрические машины переменного тока с неявно выраженными полюсами. В статоре и роторе укладываются 2 взаимно перпендикулярных обмотки.
При подаче в одну из первичных обмоток синусно-косинусного вращающегося переменного напряжения, во вторичных обмотках наводятся ЭДС, изменяющиеся по закону.  , где
, где  -коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0, 1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0, 02…0, 2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
-коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0, 1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0, 02…0, 2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
Резольвер -это специальная электрическая машина переменного тока, у которого определенным образом включены статорные и роторные обмотки. Схема ротора с двухфазной статорной и однофазной роторной обмоткой. Статорные обмотки взаимно перпендикулярны.

Между напряжением на роторной и статорной обмотках имеется следующая взаимосвязь.  (1), где КТ- коэффициент трансформации, φ -угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π /2, то
(1), где КТ- коэффициент трансформации, φ -угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π /2, то  ;
;  . В соответствие с выражением 1 можно записать, что
. В соответствие с выражением 1 можно записать, что 
Фазовый сдвиг напряжения в обмотках статора соответствует углу поворота ротора j, который связан с объектом измерения. Резольверы используются в качестве датчиков обратной связи в цифровых системах управления.
Индуктосин -это датчик, используемый для измерения линейных перемещения. Его принцип действия тот же, как и у резольвера.
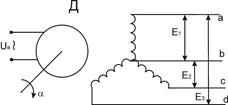
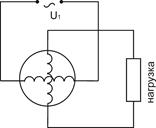
Сельсин -используется для измерения угла, представляет собой электрическую машину с однофазной обмоткой возбуждения на роторе, питаемой переменным напряжением возбуждения Uв и трехфазной статорной обмоткой.
Поле ротора наводит в обмотках фаз статора ЭДРС переменного тока, частота которого равна частоте питания Uв, а величина напряжения зависит от положения ротора. в системах ЭП сельсины работают в трансформаторном режиме и содержат элементы сельсин-датчик и сельсин-приемник.
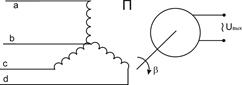
Переменное напряжение Uв подается в обмотку ротора Д. Обмотки статоров датчика и приемника соединены. ЭДС, наводимая в фазах датчика, зависящая от положения ротора, создает токи в обмотках фаз статора приемника. В результате в зависимости от положения ротора приемника в нем индуцируется ЭДС. Таким образом, на выходе получается напряжение, которое зависит от угла рассогласования: Uвых=Umax·sin(b-a). При согласовании положения роторов датчика и приемника напряжение на выходе Uвых=0. Существуют контактные и бесконтактные конструкции сельсинов. Статическая характеристика при малых углах рассогласования близка к линейной. Чувствительность их 1В/град, погрешность измерения γ ± 20-30 минут, в динамике сельсины аналогичны безинерционным звеньям.