Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Способы описания поведения автоматов
|
|
1. На основе функций переходов и выходов
Поведение автомата полностью определено, если заданы множества X, Y, Q, и функции - δ и λ:
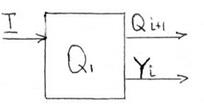
δ: Q х X → Q, функция перехода. λ: Q х X → Y, функция выхода
где Q - множество состояний автомата; X - множество входных сигналов; Y - множество выходных сигналов; δ - функция переходов в следующее состояние; λ - функция выходов.
Функции δ и λ есть декартово произведение множеств Q на X
 Фунции переходов определяет новое состояние в которое переходит автомат под действием сигнала I из состояния Q
Фунции переходов определяет новое состояние в которое переходит автомат под действием сигнала I из состояния Q
Функция выходов определяет выходное воздействие автоматов под действием выходного сигнала I
Ii х Qi → Yi,
Разновидностью функций является секвинциальные последовательности
Секвенция – означает следование некоторый шаг. xi+qi → qi+1
2 Таблица переходов – способ представления автоматов. Таблица переходов - двухвходовая таблица, строки которой отмечены входными сигналами, а столбцы - состояниями автомата. На пересечении строки, отмеченной сигналом х, и столбца, отмеченного состоянием q, записывают состояние (qt, xt) = qt + l, в которое автомат переходит из состояния q под воздействием сигнала х
Например, пусть заданы множества X = {а, b, с} и Q = {1, 2, 3, 4}. Тогда таблице переходов некоторого автомата может соответствовать табл. 1.
Таблица 1. Представление автомата в виде таблицы переходов.
| a: | ||||
| b: | ||||
| c: |
В данном примере переход δ (а, 2) = 2; δ (c, 4) = 4, и так далее. Такие переходы соответствуют единичным (символьным) воздействиям. Иногда рассматривают цепочку воздействий, или строковые воздействия. Для автомата, поведение которого задано табл. 1, возможны следующие цепочки воздействий: δ (bc, 2) = 4; δ (bbb, 3) = 1. Первую функцию переходов определяют такие единичные воздействия: δ (b, 2) = 3; δ (с, 3) = 4, вторую - δ (b, 3) = l; δ (b, l) = l; δ (b, l) = l.
3.Диаграмма переходов.Представление автомата в виде ориентированного графа - множества узлов (или вершин), связанных в определенном порядке ребрами (дугами), - является более наглядным. При этом вершины соответствуют состояниям автомата, а ребра - входным сигналам. Такое представление также называют диаграммой переходов.Например, таблица переходов (табл. 1) будет представлена в виде диаграммы переходов так, как показано на рис. 1.
 Рис1. Представление автомата в виде направленного графа (диаграммы переходов).
Рис1. Представление автомата в виде направленного графа (диаграммы переходов).
Недостатками представления автомата в форме диаграммы переходов является отсутствие … полноты контроля автоматов