Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез (настройка) регуляторов тока и скорости на «МО» в системах ТП-Д, ТВ-Г-Д (ТТВ≠0).
|
|
Требуемые показатели качества регулирования в оптимизированном контуре (колебательность и перерегулирование) обеспечиваются выбором отношения постоянных времени а, а быстродействие определяется только величиной суммарной некомпенсированной постоянной времени Тμ .
где  — суммарная некомпенсированная постоянная времени контура регулирования.
— суммарная некомпенсированная постоянная времени контура регулирования.
а=Т0 /Тμ =2
При а=2 обеспечивается время регулирования, то есть когда регулируемая переменная первый раз достигает установившейся величины, tp1 = 4, 7 Тμ при перерегулировании меньшем 5 %. Полученный оптимум принято называть «техническим» или «модульным».
Настройка на модульный оптимум обеспечивает наилучшие показатели регулирования по каналу управления, но не обеспечивает быстрой реакции системы на возмущение. Таким образом, для компенсации влияний возмущений регулятор должен быть настроен на «Симметричный Оптимум» (а=Т0/Тμ =4). В этом случи регулируемая переменная первый раз достигает установившейся величины, tp1 = 3, 1 Тμ
Синтез регулятора тока:
При синтезе регулятора тока пренебрегаем влиянием внутренней обратной связи по ЭДС двигателя, что сказывается на точности регулирования тока, незначительно влияет на динамические показатели, но существенно упрощается синтез регулятора. При этом передаточная функция объекта регулирования КРТЯ примет вид:
Желаемая передаточная функция разомкнутого КРТЯ:
Передаточная функция регулятора тока:
то есть получена передаточная функция ПИ-регулятора:
с постоянной времени интегрирования: 
и коэфф. усиления пропорциональной части:
Kут=Тя /Тит
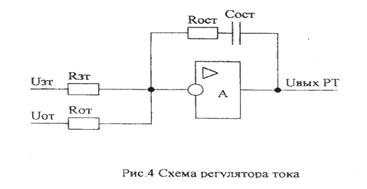
Параметры элементов и передаточной функции регулятора тока связаны следующими соотношениями:
Тит=RзтСост
Кут=Rост /Rзт
Тя=RостСост
Синтез регулятора скорости:
В соответствии с рис. 3 объект регулирования скорости состоит из замкнутого контура регулирования тока якоря и механического звена электропривода и имеет передаточную функцию:

где Тм=(RяΣ × JΣ )/c2 — электромеханическая постоянная времени электропривода;
 — постоянная двигателя, В× с;
— постоянная двигателя, В× с;
Rя.д — активное сопротивление якорной цепи двигателя, Ом.
Тм=(3, 3× 0, 12)/0, 772=0, 67 с
Преобразуя передаточную функцию объекта регулирования скорости, пренебрегая членом, содержащим р2 вследствие малости его коэффициента, в передаточной функции замкнутого КРТЯ:
Желаемая передаточная функция разомкнутого контура регулирования скорости имеет вид:
 ,
,
где ас=Тос /Тμ с — отношение постоянных времени в оптимизированном КРС.
Передаточная функция регулятора скорости:
Таким образом, получен пропорциональный регулятор скорости с коэфф. передачи:
 ,
,
где Rоос и Rзс — соответственно сопротивления резисторов цепи обратной связи и задающего входа усилителя (рис. 6).
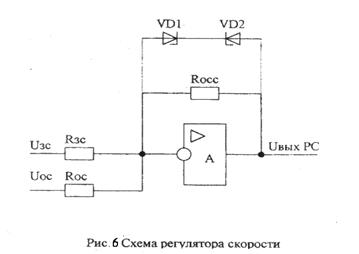
Коэфф. обратной связи приводится к цепи задающего сигнала:
Кос=КBRRзс /Rос,
где КBR=UBR /ω дв — передаточный коэфф. тахогенератора.
Для определения величины Кос необходимо задаться наибольшим входным напряжением задания по скорости Uзс.max, соответствующим заданной величине скорости идеального холостого хода двигателя. Эти параметры связаны между собой следующим соотношением:
Uзс.max=Kосω 0
Уравнение статической электромеханической характеристики в системе подчиненного регулирования координат получим исходя из условия равенства напряжений задания по току якоря Uзт=(Uзс-Косω)Wpc(p) и обратной связи Uот=КотIя на входе регулятора тока. Тогда
 , или
, или
 ,
,
а в случае настройки обоих контуров регулирования на “модульный оптимум”, то есть при ас=ат=а=2, выражение примет вид:
Еще раз отмечаем, что контуры регулирования в системах подчиненного регулирования координат по управляющему воздействию являются астатическими, т.е. ошибки регулирования координат равны нулю (при Мс=0 ω 0=Uзс /Кос=const и при Едв=сω =0 Iстоп=Uзт.max / Кот=const).
При действии возмущающего воздействия появляется статическая ошибка регулирования по скорости:
Статические электромеханические характеристики привода оптимизированного методом последовательной коррекции и настроенные на «модульный оптимум» приведены на рис. 8.
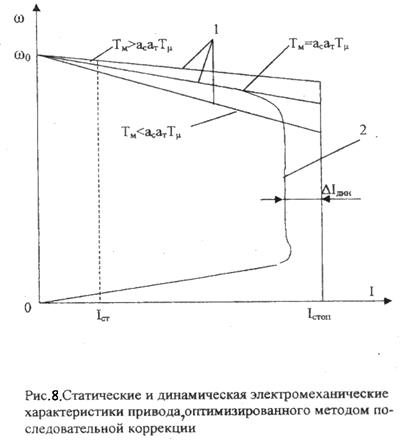
1 – статические характеристики
2 – динамическая характеристика