Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез систем дискретного управления электроприводами
|
|
Рассматриваемые в данной главе дискретные логические системы управления (ДЛСУ) имеют дискретную элементную базу, т.е. могут выполняться на контактной и бесконтактной аппаратуре с использованием реле, логических элементов, цифровых узлов, программируемых логических контроллеров. ДЛСУ осуществляют автоматизацию движения рабочих органов установки в технологических режимах. Это означает, что ДЛСУ вырабатывает и подает команды на выполнение в определенной последовательности операций: выбора направления и скорости движения, пуска, торможения, создания паузы, возобновления движения, а также защитного отключения электропривода и остановки рабочих органов в аварийных режимах. Установка может иметь несколько рабочих органов (РО), каждый из которых приводится в движение своим индивидуальным двигателем. Требуемый технологический режим таких установок осуществляется согласованной работой двигателей, которая обеспечивается ДЛСУ. К данным установкам могут быть отнесены: лифт, имеющий в качестве РО кабину, дверь кабины, дверь шахты; станок с инструментальным магазином и с механизмом подачи инструмента; многокоординатный манипулятор и т. п.
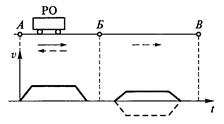
В технологических режимах перемещения РО конечны в пространстве и цикличны во времени. Во всем разнообразии возможных цикловых перемещений РО можно выделить некоторую типовую диаграмму движения, которая является составной частью практически во всех циклах. Это перемещение РО из одной позиции (А) в другую (Б) с возможным движением к следующей позиции (В) или возвращением в исходную позицию (А) (рис.). Движение РО чередуется с временными паузами, необходимыми по технологическим условиям работы электропривода.
Исходным данным для синтеза ДЛСУ является заданный технологический цикл движения РО, по которому составляется последовательность всех операций, необходимых для выполнения цикла. К таким операциям относятся загрузка РО, пуск двигателя для движения в нужном направлении с необходимой скоростью, торможение и остановка двигателя, создание паузы для разгрузки РО и т.д. Каждой отдельной операции соответствует определенная часть ДЛСУ — узел ДЛСУ. Такими узлами можно воспользоваться как «кирпичиками» для построения всей системы управления. Выполняемый на основе узлов синтез носит название синтез методом типовых узлов.
Идея данного синтеза заключена в выполнении двух процедур: декомпозиции — выделении в составе создаваемой ДЛСУ функциональных узлов, соответствующих необходимым технологическим операциям, и композиции — воссоединении узлов в единую систему управления. Данные процедуры выполняются поэтапно:
этап 1 — выделение отдельных операций для ДЛСУ и составление последовательности их выполнения;
этап 2 — выбор и составление узлов ДЛСУ для выделенных операций;
этап 3 — выполнение электрических соединений узлов и составление принципиальной схемы ДЛСУ;
этап 4 — проверка составленной схемы ДЛСУ детальным анализом ее работы.
Выполнение этапа 1 представляет собой составление алгоритма работы ДЛСУ в той или иной форме. От того, насколько правильно и точно составлены операции, зависит правильность отбора узлов и работоспособность в целом синтезируемой ДЛСУ. Выполнение этапов 1, 2, 3 требует от проектанта определенных творческих усилий, изобретательности и навыков в данной области. Иногда для выполнения синтеза бывает достаточно простого эвристического подхода методом проб и проверок. Однако имеются определенные приемы формализации процедуры синтеза с использованием математического описания ДЛСУ, что облегчает и убыстряет построение ДЛСУ.