Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Моделі гіпотетичного образу для сегментування зображень
|
|
Індексування є важливим інструментом в системах знаходження зображень за їх вмістом. Швидкість формування та адекватність є головними критеріями якості ознак зображень, що використовуються в цих системах..
Визначення ознак образів для індексування потребує швидких алгоритмів їх сегментування. На сьогодні в літературі представлено велику кількість публікацій щодо методів сегментації зображень. Їх умовно розділяємо на два класи: ті, що базуються на знаходженні порогу інтенсивності і ті, в яких поділ здійснюється виділенням регіонів зображення з певними властивостями. В перших визначаються пороги інтенсивності на основі гістограм. Серед них виділяємо алгоритми знаходження мінімальної інтенсивності [1], опуклості [2], моментів [3], ентропії [4], мінімальних похибок [5, 6] тощо. Яскравим представником методів з другого класу є метод поділу графа на частини [7]. Недоліками вказаних та інших алгоритмів є різні пороги для однакових зображень навіть в межах алгоритмів одного класу. Більшість алгоритмів доволі громіздкі, особливо ті, що використовують моделі з графів або базуються на статистичних розрахунках. Автоматичні системи пошуку зображень опрацьовують мільйони і більше зображень в реальному часі, тому потребують надзвичайно швидких і достатньо точних засобів визначення ознак зображень. Алгоритм сегментування є важливим складовим інструментом цих засобів.
В роботі розглянуто алгоритми, які задовольняють вимогам систем автоматичного пошуку зображень, а саме: прості в реалізації і з зрозумілим фізичним змістом..
Для кумулятивної гістограми маємо:
 (1)
(1)
де  – частоти за інтенсивністю,
– частоти за інтенсивністю,  – накопичувальна частота для даної інтенсивності, n – кількість інтервалів кумулятивної гістограми, s, i – номер інтервалу (значення інтенсивності).
– накопичувальна частота для даної інтенсивності, n – кількість інтервалів кумулятивної гістограми, s, i – номер інтервалу (значення інтенсивності).
Для гіпотетичного зображення побудуємо нормовану кумулятивну гістограму за формулою:
 (2)
(2)
де  – кількість пікселів (накопичена частота) гіпотетичного зображення в інтервалі інтенсивності 1÷ s. – це множина пікселів, у якій всі інтенсивності представлені однаковою кількістю. Число пікселів інтенсивності кожного значення дорівнює
– кількість пікселів (накопичена частота) гіпотетичного зображення в інтервалі інтенсивності 1÷ s. – це множина пікселів, у якій всі інтенсивності представлені однаковою кількістю. Число пікселів інтенсивності кожного значення дорівнює  , де N, M – розміри зображення, для якого ведеться пошук порогу сегментування, n – кількість інтервалів кумулятивної гістограми.
, де N, M – розміри зображення, для якого ведеться пошук порогу сегментування, n – кількість інтервалів кумулятивної гістограми.
Цю модель назвемо однофрагментною, оскільки дана гістограма зображається одним відрізком на весь інтервал інтенсивності 0 ÷ 255.
Мінімум вказує, що до нього відбувалось швидке збільшення густини пікселів сегментів, а після нього швидкість наростання зменшується. Максимум, навпаки, вказує на попереднє повільне наростання і подальше більш швидке наростання. Пошук координат екстремумів здійснюється в двох інтервалах: від чорного до медіани для сегментування чорного, від медіани до білого для сегментування сірого фону. Таким чином, координата екстремуму вказує на інформативну частину зображення, яку можна сегментувати. На рис.1 в за функцією  знайдено поріг сегментування I=14 і сегмент.
знайдено поріг сегментування I=14 і сегмент.
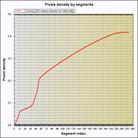
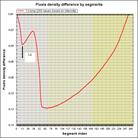

а б в г
Рис.1. Зображення (а), густина пікселів сегментів (б),
різниця між густинами реального і гіпотетичного зображень (в), сегментоване зображення (г)
Зазначимо, що в першому і другому методах крім I=14 є ще два екстремуми: I=37, I=59. Однако число 12 у цих сегментах зашумлене елементами текстури (рис.2а). Пороги I=14 та I=59 vможна побачити на рис.4а, на якому зображено проекція інтенсивності зображення «12» зі сторони площини XOZ […Комп ]. За результатами порівняння методів сегментування з роботи [ Xu ] найменший поріг становить I=47, а за алгоритмом Отцу I=116 [ ]. Відповідні сегменти наведені на рис.2. Тобто статистичними методами неможливо знайти поріг I= 14-16.

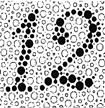
Рис.2. Сегменти зображення «12»: I=37, I=47, I=106