Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
При помощи программы FCT.
|
|
Для начала работы с приводами стенда необходимо сконфигурировать их индивидуальный контроллер. Сначала создаем проект и назначаем имя.
На первом этапе во вкладке “Components” вводим оборудование с которым будем работать, для этого открываем список и выбираем нужыне:
1) Контроллер для шаговых двигателей CMMS-ST-C8-7-G2
2) Двигатель типа EMMS-ST-57-S-SE
3) Линейный преобразователь типа EGSK-33-300-6P
После ввода оборудования окно будет иметь следующий вид (рис.6.1)

Рис.6.1
Далее выбираем во вкладке application data в списке control interface что линейный преобразователь подключен к дискретным входам/выходам показано на (рис. 6.2.).
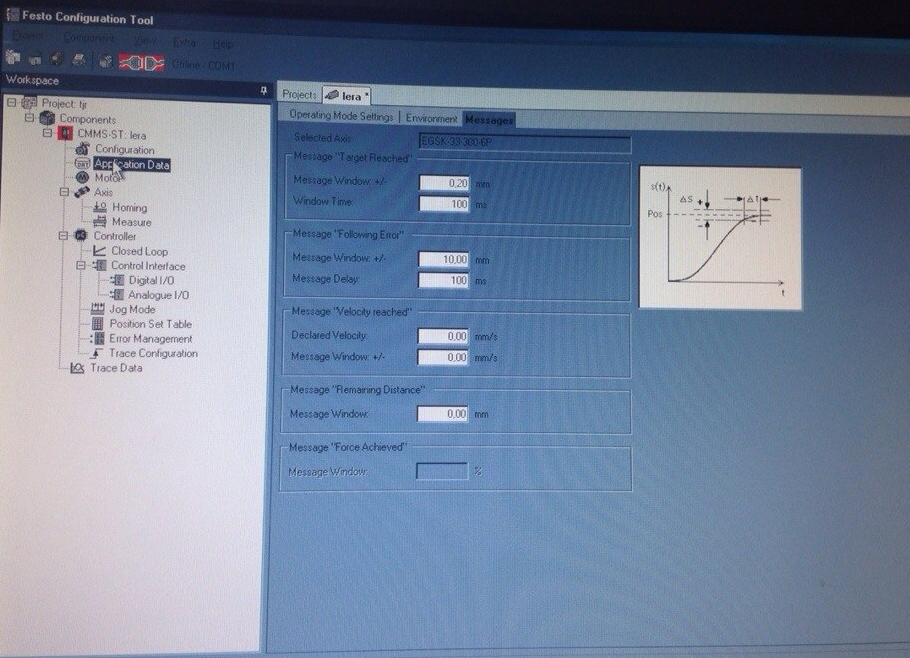
Рис.6.2.
Далее во вкладке Digital I/O выбираем входы и выходы которые используем как на (рис.6.3.).
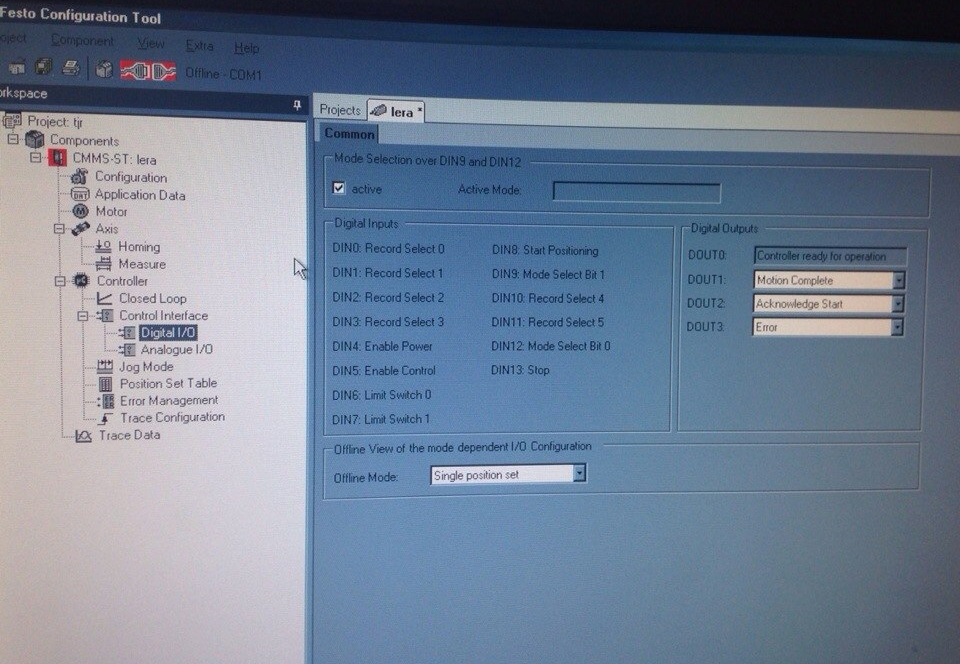
Рис.6.3.
Во вкладке Position Set Table вводим в таблицу начальные и конечные значения для реперных точек. Значения показаны на (рис.6.4.).
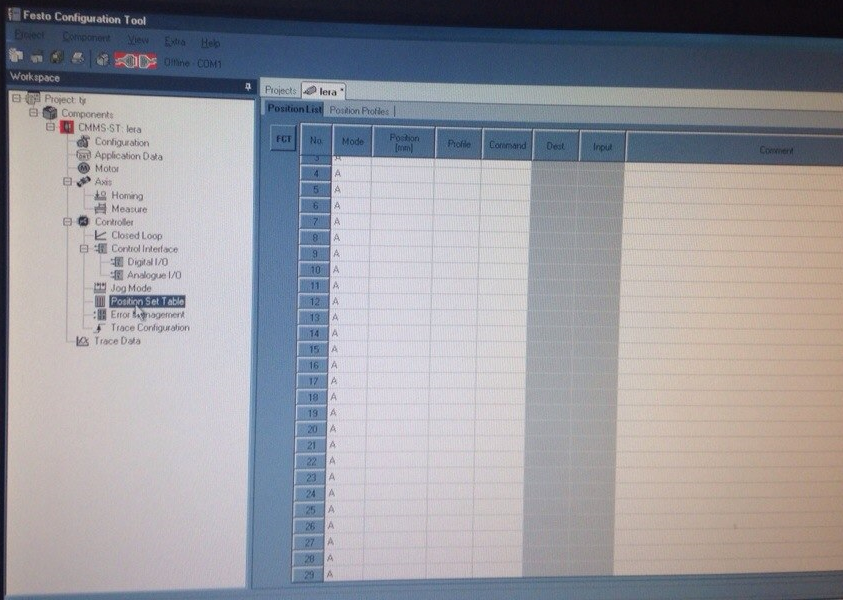
Рис.6.4.
В данной работе будет использоваться еще один контроллер двигателя с маркировкой: CMMS-ST-C8-7. Его конфигурация происходит аналогично с предыдущим контроллером.