Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Ієрархічні кольорові сітки Петрі
|
|
Перш, ніж визначити ієрархічну кольорову сітку Петрі введемо наступні поняття.
Визначення 3.1. Перехід tI у КСП N = (P, T, W, F, H, l, y, m0) називається джерелом, якщо
" p Î P: F (p, tI) = 0,
тобто у перехід tI не входить ні однієї дуги.
Визначення 3.2. Перехід tS у КСП N називається стоком, якщо
" p Î P: H (tS, p) = 0,
тобто з переходу tS не виходить ні одна дуга.
Визначення 3.3. КСП N, що зображується зв’язним графом щонайменше з одним джерелом і з одним стоком, називається блоком.
Визначення 3.4. Зв’язувальною сіткою NS щодо блока N називають таку КСП, що утворюється з блока N додаванням до нього позиції p 0, яка називається нульовою позицією, і дуг, що ведуть з p 0 в усі джерела і з усіх стоків в p 0. Таким чином, зв’язуюча сітка NS немає жодного джерела tI і жодного стоку tS.
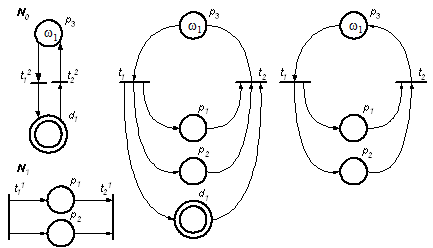
Приклад блока з джерелом t 4, t 6 і стоками t 5, t 7 і відповідна цьому блоку зв’язуюча сітка зображені на рис. 3.11.
Визначення 3.5. Нульовим маркуванням зв’язувальної сітки NS блока N називають таке маркування m0(p 0, w), де в нульовій позиції p 0 є по одному маркеру всіх кольорів, а всі інші позиції порожні; відповідне їй маркування блока називають “порожнім”, тобто
" p Î N, " w Î W: m(p, w) = 0;
" p Î NS, " w Î W $ p 0 Î NS: m(p 0, w) = 1.
Визначення 3.6. Блок N називається коректно сформованим, якщо:
- його зв’язувальна сітка NS при початковому нульовому маркуванні m0(p 0, w) безпечна в цілому (по всіх кольорах), тобто
" p Î NS, " wÎ W: m(p, w) £ 1;
- будь-яка послідовність спрацьованих переходів, яка реалізована в блоці з порожнього початкового маркування m0(p 0, w), закінчується порожнім маркуванням тільки за умови, якщо кількість спрацювань переходів tI і tS однакова;
- як початкові маркування m поч (p, w) використовуються лише такі, для яких мають місце співвідношення:
 ;
;
 .
.
 Рис. 3.11. Приклади зображення сіток:
Рис. 3.11. Приклади зображення сіток:
а – сітка у вигляді блоку; б – зв’язувальна сітка
Звичайно передбачається, що ніякі два переходи в сітці Петрі не можуть спрацьовувати одночасно.
На відміну від цього, для деяких переходів не тільки допускається одночасне спрацьовування, але, навпаки, забороняється неодночасне спрацьовування. Такі переходи утворюють перехід-зв’язку.
Визначення 3.7. Переходом-зв’язкою називають підмножину переходів  , при якій з будь-якої їх вхідної позиції дуга веде тільки в один з переходів, що знаходяться у зв’язці.
, при якій з будь-якої їх вхідної позиції дуга веде тільки в один з переходів, що знаходяться у зв’язці.
Спрацьовування переходу-зв’язки  може відбутися тільки тоді, коли порушені усі вхідні в нього переходи.
може відбутися тільки тоді, коли порушені усі вхідні в нього переходи.
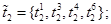
У сітці Петрі переходи-зв’язки завжди можна замінити простими переходами. Приклад сітки Петрі з переходами-зв’язками 
 та їх заміною простими переходами показаний на рис. 3.12.
та їх заміною простими переходами показаний на рис. 3.12.

а) б)
Рис. 3.12. Сітка Петрі з переходами-зв’язками (а) і простими переходами (б)
За допомогою переходів-зв’язок легко відображати зв’язки між алгоритмами, підалгоритмами та операторами.
Використовуючи наведені поняття, дамо визначення ієрархічної кольорової сітки Петрі (ІКСП).
Визначення 3.8. Ієрархічною кольоровою сіткою Петрі називається набір  , який складається з кінцевої множини коректно сформованих блоків
, який складається з кінцевої множини коректно сформованих блоків  , що частково впорядковано у відповідності з відношення
, що частково впорядковано у відповідності з відношення  .
.
Відношення  між блоками графічно представляється деревом, кореню якого відповідає старша сітка N 0, що може і не бути коректно сформованим блоком (рис. 3.13, а).
між блоками графічно представляється деревом, кореню якого відповідає старша сітка N 0, що може і не бути коректно сформованим блоком (рис. 3.13, а).
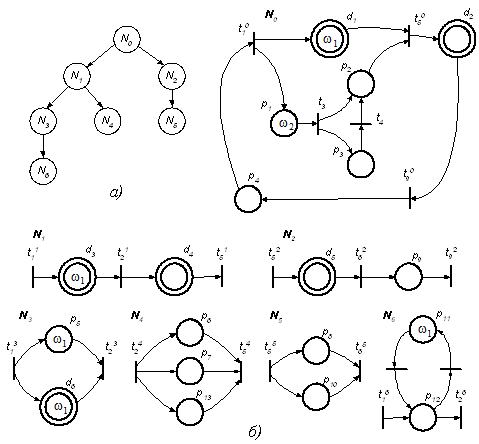
Рис. 3.13. Ієрархічна кольорова сітка Петрі:
а – дерево відношення; б – зображення сітки
Для будь-яких двох сіток Nи і Nv, що відповідають початковій і кінцевій вершинам дуги дерева відношення сітки N*, присутня особлива позиція dv Í Nи, що називається дублером блока Nv.
Позиція-дублер блока Nv в ІКСП зображається подвійним кругом із символом dv. Блок Nv дублюється позицією-дублером dv, що належить тільки сітці Nи. Таким чином, індекси дублера і дублюючого ним блока завжди збігаються. Між вхідними (вихідними) переходами дублера і джерелами (стоками) дублюючого ним блока має місце взаємнооднозначна відповідність. При цьому кожен вхідній (вихідний) перехід дублера і співставлене йому джерело (стік) у дублюючому блоці входять в один перехід-зв’язку.
У старшій ІКСП, показаній на рис. 3.13, б, містяться дублери d 1 і d 2 блоків N 1 і N 2, у блоці N 1 – дублери d 1 і d 4 блоків N 3 і N 4, у блоці N 2 – дублер d 5 блока N 5, у блоці N 3 – дублер d 6 блока N 6.
У ІКСП існують наступні переходи-зв’язки:



причому вхідному переходу  дублера d 1 в старшій сітці N 0 співставлене джерело
дублера d 1 в старшій сітці N 0 співставлене джерело  в блоці N 1, а вихідному переходу
в блоці N 1, а вихідному переходу  – стік
– стік  , вхідному переходу дублера d 3 в блоці N 1 співставлене джерело
, вхідному переходу дублера d 3 в блоці N 1 співставлене джерело  в блоці N 3, а вихідному переходу
в блоці N 3, а вихідному переходу  – стік
– стік  і т.д.
і т.д.
Визначення 3.9. Початкові маркування блоків Ni і старшої сітки N 0 в ІКСП N = { Ni } погоджені наступним чином:
- якщо всі позиції дублюючого блока порожні, то в дублері маркер відсутній, тобто
 ;
;
- якщо не всі позиції дублюючого блоку порожні, то в дублері знаходиться маркер того ж кольору, що й у дублюючому блоці і, крім цього,
 .
.
Для алгоритмів управління ГВС позиції-дублери ІКСП означають наступне: кожному дублеру відповідає підалгоритм, що є алгоритмом, опис якого задається дублюючим блоком. Якщо в дублюючому блоці міститься свій дублер, то йому також відповідає підалгоритм, але вже більш низького рівня складності, і так доти, поки якому-небудь дублеру не буде відповідати оператор. Співвідношення алгоритмів за складністю визначається деревом відношень: рівень складності підалгоритму тим вищий, чим ближче до кореня дерева знаходиться сітка, яка містить дублер, що відповідає цьому підалгоритму.
Як підалгоритми алгоритму управління ГВС можна виділити алгоритми управління АТСС, роботом-штабелером, автономним транспортним модулем тощо.
Таким чином, ієрархічна сітка Петрі дозволяє у явному вигляді відбивати ієрархію операторів в алгоритмах управління ГВС і використовувати її при описі алгоритмів.
З метою модифікації застосуємо до ІКСП дві операції: заміщення дублера блоком і заміщення вузла дублером.
Операція заміщення дублера блоком полягає в наступному: сітка з дублером, що заміщається, поєднується з дублюючим блоком шляхом заміни відповідних переходів-зв’язок еквівалентними їм простими переходами; з отриманої сітки віддаляється позиція-дублер разом з інцидентними з нею дугами.
Приклад виконання цієї операції наведений на рис. 3.14. Ієрархічна сітка (рис. 3.14, а) після об’єднання сітки, що містить дублер d 1, з дублюючим блоком N 1 перетворюється в сітку, зображену на рис. 3.14, б. Після видалення позиції d 1 та інцидентних їй дуг отримаємо сітку, показану на рис. 3.14, в.
В результаті послідовного заміщення дублерів (у довільному порядку) з вихідної ІКСП виходить проста сітка. Зміст операції заміщення дублера полягає в тому, що, маючи множину операторів у підалгоритмах у вигляді окремих блоків і застосовуючи суперпозицію, можна побудувати алгоритм управління ГВС у вигляді простої сітки Петрі.
Операція заміщення локалізованого вузла є оберненою до операції заміщення дублера і дозволяє з простої сітки Петрі отримати ієрархічну.
а) б) в)
Рис. 3.14. Ієрархічна сітка (а) і приклад операцій заміщення дублера (б) і вузла (в)