Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении активных сопротивлений.
|
|
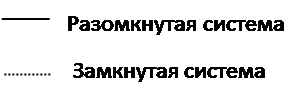
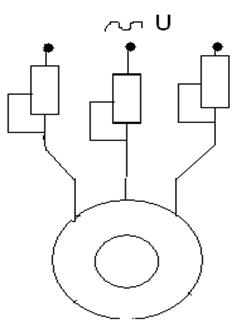
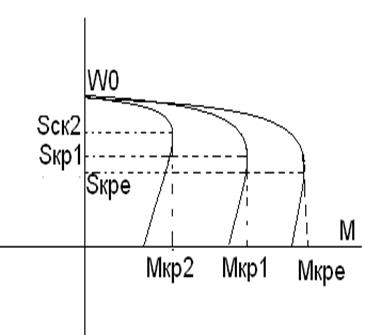
 Регулирование АД с помощью активного Rд в роторе
Регулирование АД с помощью активного Rд в роторе
 Электрическая схема
Электрическая схема
Rде< Rд1< Rд2
Основные соотношения:
R=var↑ Mкр=const из w=f(M)
R=var↑ Sкр↑ var из соотношения Sкр 
R=var↑  ↓ var из соотношения для W=f(I)
↓ var из соотношения для W=f(I)
R=var↑ I1↓ var
R=var↑ w0=const т.к 
1)s=0; w=w0- режим идеального ХХ
2)S=1; w=0-режим КЗ
3)0< S< 1; 0< w< w0- двигательный режим
4)S< 0, W> w0- генераторный режим(рекуперативного торможения)
5)S> 1, w< 0-генераторный режим (торможение противоключением)
6)режим Динамического торможения - статор, к const ток, цепь ротора замыкается накоротко
Хорош для const нагрузки т.к с увеличением  жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
Достаток: уменьшается пусковой ток, экономичность.
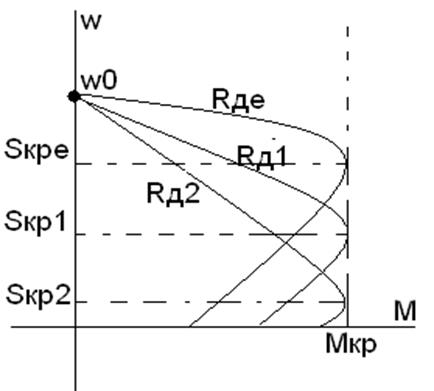
 Регулирование АД с помощью активного Rд в статоре
Регулирование АД с помощью активного Rд в статоре
Электрическая схема
Rде< Rд1< Rд2
Основные соотношения:
R=var↑ Mкр↓ var из w=f(M) R=var↑ Sкр↓ var
R=var↑  ↓ var из соотношения для W=f(I) R=var↑ I1↓ var
↓ var из соотношения для W=f(I) R=var↑ I1↓ var
R=var↑ w0=const т.к 
1)s=0; w=w0- режим идеального ХХ 2)S=1; w=0-режим КЗ 3)0< S< 1; 0< w< w0- двигательный режим 4)S< 0, W> w0- генераторный режим(рекуперативного торможения) 5)S> 1, w< 0-генераторный режим (торможение противоключение). Достаток: уменьшается пусковой ток. Недостаток: с увеличением R1 уменьшается рабочая область.
 27. Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении реактивных сопротивлений.
27. Искусственные механические и электромеханические характеристики асинхронного двигателя при изменении реактивных сопротивлений.
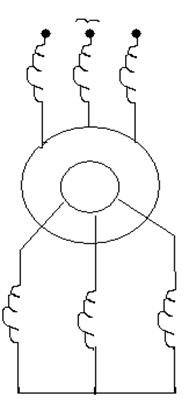
Электрическая схема
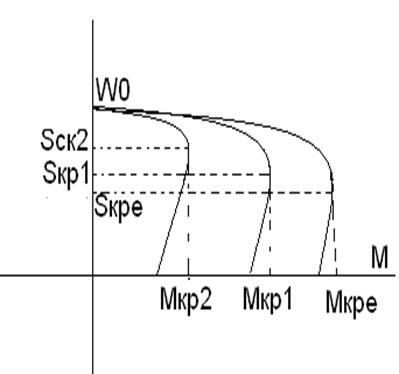
Xк2> Xк1> Xке
Механическая характеристика
Xк=X1+X2
Основные соотношения:
R=var↑ Mкр↓ var из w=f(M)
R=var↑ Sкр↓ var из соотношения Sкр 
R=var↑  ↓ var из соотношения для W=f(I)
↓ var из соотношения для W=f(I)
R=var↑ I1↓ var
R=var↑ w0=const т.к
1)s=0; w=w0- режим идеального ХХ
2)S=1; w=0-режим КЗ
3)0< S< 1; 0< w< w0- двигательный режим
4)S< 0, W> w0- генераторный режим(рекуперативного торможения)
5)S> 1, w< 0-генераторный режим (торможение противоключение)Способ схож с регулирование скорости с помощью активного Rд в статоре
|
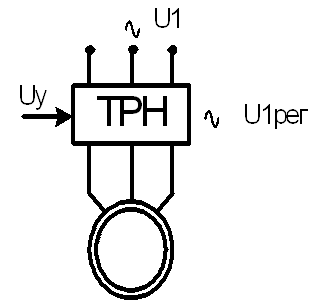

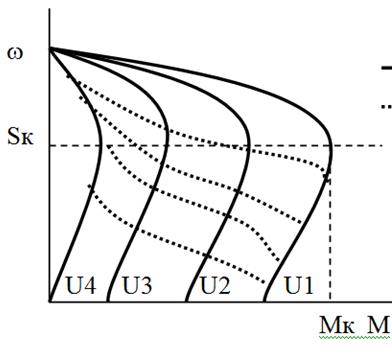
 ТРН – тирристорный регулятор напряжения.
ТРН – тирристорный регулятор напряжения.
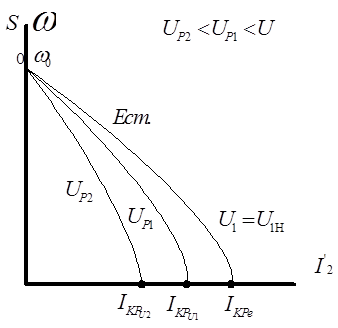
U1рег можно менять в диапазоне от 0 до U1н, при этом частота остается постоянной.
Скорость изменяют изменением напряжения, подводимого к статорной цепи.
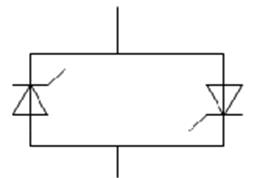
Тиристоры включены встречно-параллельно.
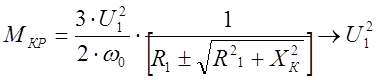
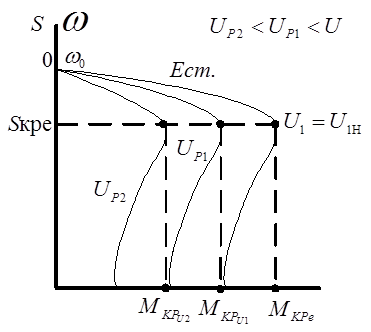
Критические скольжение и момент:
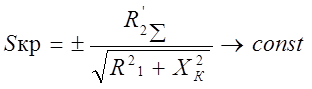 скольжение не зависит от напряжения.
скольжение не зависит от напряжения.
 ;
;  ;
; 
С уменьшением напряжения падает критический момент.
Электромеханические характеристики.
Хар-ки в разомкнутой системе получаются мягкими при больших углах, поэтому систему замыкают.