Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Показники якості перехідних процесів
|
|
З попередніх тверджень ми знаємо, що автоматична система передусім має бути стійкою. В стійкій системі перехідний процес затухає. Однак для практики не є байдужим характер затухання перехідного процесу. Так, наприклад, якщо перехідний процес затухає помалу, і система довго входить в новий установлений режим, то вона володіє недостатньою швидкодією, і, як наслідок, її застосування буде обмеженою. Тому стійкість є необхідною але недостатньою умовою роботоздатності автоматичних систем. Достатньою умовою є якість процесів і помилками в установлених режимах.
Якість перехідних процесів здебільшого оцінюють за перехідною функцією  , яка являє собою реакцію на зовнішній вплив типу одиничної ступінчатої функції
, яка являє собою реакцію на зовнішній вплив типу одиничної ступінчатої функції  . Для слідкуючих систем керування розглядають перехідну функцію по відношенню до заданого впливу
. Для слідкуючих систем керування розглядають перехідну функцію по відношенню до заданого впливу  , а для систем стабілізації – по відношенню до
, а для систем стабілізації – по відношенню до  .
.
На прикладі перехідної функції  (рис. 4.11) ознайомимось з основними показниками якості перехідного процесу: часом коливань, перерегулюванням, основною частотою коливань, кількістю коливань, максимальною швидкістю і максимальним прискоренням регульованої величини.
(рис. 4.11) ознайомимось з основними показниками якості перехідного процесу: часом коливань, перерегулюванням, основною частотою коливань, кількістю коливань, максимальною швидкістю і максимальним прискоренням регульованої величини.
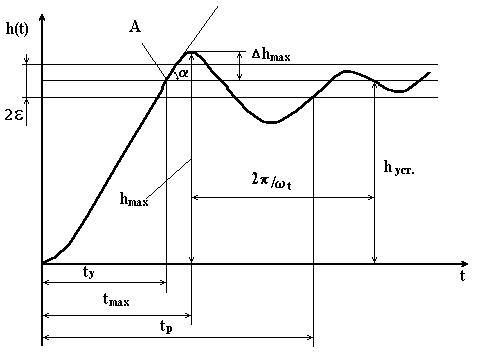 Рисунок 4.11 – Графік перехідної функції h(t)
Рисунок 4.11 – Графік перехідної функції h(t)
|
Час регулювання  визначається тривалістю перехідного процесу. Теоретично перехідний процес триває нескінченно довго, однак на практиці вважається, що він закінчується, як тільки відхилення керованої величини від нового її встановленого значення не буде перевищувати допустимих значень e. Найчастіше приймається
визначається тривалістю перехідного процесу. Теоретично перехідний процес триває нескінченно довго, однак на практиці вважається, що він закінчується, як тільки відхилення керованої величини від нового її встановленого значення не буде перевищувати допустимих значень e. Найчастіше приймається  від
від  . Часом регулювання характеризують також часом
. Часом регулювання характеризують також часом  досягнення перехідною функцією перший раз нового встановленого значення або часом
досягнення перехідною функцією перший раз нового встановленого значення або часом  досягнення максимального значення
досягнення максимального значення  .
.
Перерегулювання  , або вихід, являє собою максимальне відхилення регульованої величини від нового значення, що встановилося. Як правило, перший максимум є найбільшим. Відносне перерегулювання вираховується за формулою
, або вихід, являє собою максимальне відхилення регульованої величини від нового значення, що встановилося. Як правило, перший максимум є найбільшим. Відносне перерегулювання вираховується за формулою
 .
.
Час регулювання і перерегулювання, основні показники перехідного процесу, тісно пов’язані між собою. На перший погляд може здатися, що перерегулювання недопустиме, так як воно збільшує час регулювання. Однак це не так. Переважно перерегулювання появляється внаслідок того, що система до нового встановленого стану підходить з певною швидкістю, яка графічно відображається тангенсом кута нахилу дотичної в точці А (рис. 4.11).
 .
.
Чим більша ця швидкість, тим довше за встановлене положення пройде система за інерцією. Отже, для зменшення перерегулювання необхідно зменшити швидкість, з якою система підходить до нового встановленого стану. Це, в кінці кінців, призводить до збільшення часу регулювання. Якщо система підходить до нового встановленого стану з нульовою швидкістю, то перерегулювання зовсім не буде, але час регулювання значно збільшиться (рис. 4.12, б).
Так як час регулювання характеризує швидкодію системи, то стараються, там, де це необхідно, звести її до мінімуму. Це означає, що система має відробляти задану дію з великою швидкістю, що в подальшому призводить до великого перерегулювання. Крім цього, оскільки перехідний процес коливається, то будуть мати місце великі прискорення регульованої величини, що може викликати недопустимо великі динамічні навантаження на елементи системи. Таким чином, як відсутність, так і дуже велике перерегулювання небажані. Тому як оптимальне допускають перерегулювання в межах 20-30%. При цьому число напівколивань перехідної функції рівне 2-3.
Числові значення регулювання перерегулювання часто задаються як вихідні дані синтезу коректуючих механізмів, оскільки забезпечується подавлення небажаних відхилень регульованої величини в перехідному процесі.
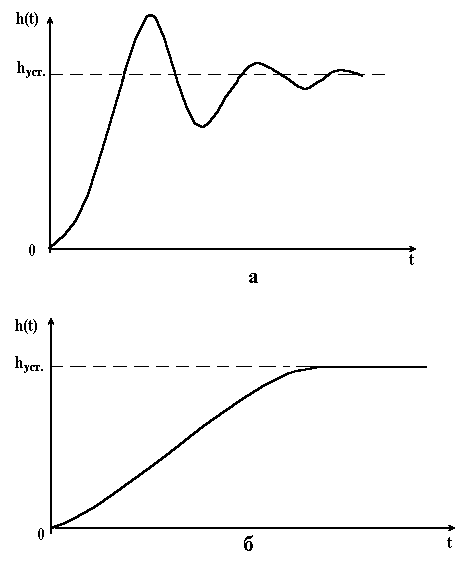 Рисунок 4.12 – Графіки перехідних функцій з великим перерегулюванням в системі (а) та при відсуності перерегулювання (б)
Рисунок 4.12 – Графіки перехідних функцій з великим перерегулюванням в системі (а) та при відсуності перерегулювання (б)
|
Для деяких систем перерегулювання зовсім небажане, наприклад, для систем автоматичного регулювання хімічних процесів, де перерегулювання може погіршити продукцію, що виготовляється. Необхідно також мати на увазі, що бажання зменшити час регулювання призведе до збільшення потужності виконуючого пристрою.