Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Система регулирования тока и момента с помощью отрицательной об-
|
|
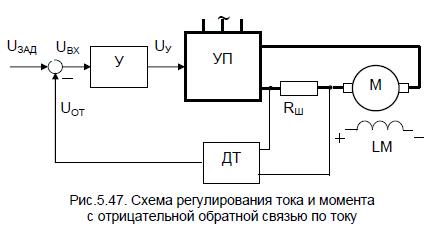
ратной связью по току. Схема замкнутой системы с отрицательной обратной
связью по току приведена на рис.5.47. Эта схема повторяет схему на рис.5.45,
только знак обратной связи – отрицательный. Но знак обратной связи полностью
меняет принцип работысхемы. При постоянномнапряжении заданияувеличение тока якоряприводит к снижениюЭДС преобразователя иснижению скорости. Та-
кая система способнаподдерживать ток якоря.Если в системе урав-
нений для статики (5.16)изменить знак обратнойсвязи и разрешить урав-
нение 5.17 относительнотока, то получим выра-жение электромехани-ческой характеристики
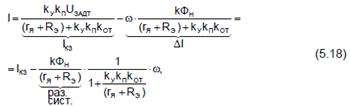
из которого видно, что первый член этого уравнения определяет ток короткого
замыкания IКЗ. Величина тока короткого замыкания IКЗ определяется напряжени-
ем задания тока UЗАДТ. Второй член уравнения отражает отклонение тока Δ I от
тока короткого замыкания IКЗ, зависящее от скорости, а точнее, от ЭДС двигате-
ля Е = кФН· ω. Чем больше скорость ω, тем больше Е, тем меньше ток в цепи
якоря.
При UЗАДТ = const и ω = 0 ток цепи якоря равен току короткого замыкания IКЗ ≡
UЗТ, отклонение тока Δ I = 0. Появление скорости и ЭДС приводит к отклонению
тока, Δ I > 0, а величина отклонения зависит от коэффициента обратной
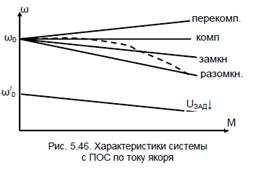
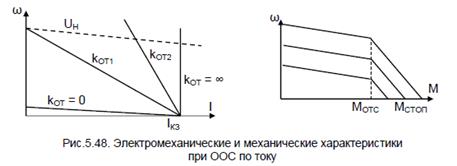
связи кОТ. Электромеханические характеристики системы с ООС по току приве-
дены на рис.5.48.
Если kОТ = ∞, то Δ I = 0, характеристика проходит вертикально. При kОТ = 0
характеристика приобретает наклон естественной характеристики. Работа сис-
темы ограничена по скорости номинальным напряжением UН двигателя (пунк-
тирная линия на рис.5.48).
Для М = МКЗ =const требуетсяkОТ = ∞. В качествеусилителя исполь-зуют ПИ или И –регуляторы. Ино-гда ООС по токуиспользуют дляподдержания мо-мента двигателяпри пуске, чащевсего – в режимеотсечки для огра-ничения предель-
ных значений тока (момента), так называемые экскаваторные характеристики
(рис. 5.48). ООС в этих схемах вступает в работу, если момент двигателя пре-
высит допустимое значение – момент отсечки МОТС. Напряжение на якоре сни-
жается, и двигатель останавливается при моменте стопорения МСТОП.
Жёсткая отрицательная обратная связь по току обеспечивает регулирование
момента двигателя. При этом задаются допустимым отклонением момента от
заданного значения, пропорционального отклонению тока Δ I, и рассчитывают
необходимый коэффициент усиления кУ. Определим отклонение тока Δ I из фор-
мулы (5.18)