Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Частотное регулирование скорости ад
|
|
Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода
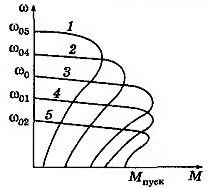
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30): 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты Iвых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
12) Показатели регулирования электропривода
Регулированием скорости является принудительное изменение скорости двигателя в целях регулирования скорости движения исполнительных органов машин и механизмов. В общем случае регулирование скорости двигателей – а под этим понимается также и поддержание скорости на заданном уровне – может осуществляться двумя способами – параметрическим и в замкнутых системах.
При параметрическом способе регулирование достигается изменением каких-либо параметров электрических цепей двигателей или питающего напряжения за счет включения, например, различных дополнительных элементов: резисторов, конденсаторов, индуктивностей. Качество такого регулирования скорости обычно оказывается не очень высоким.
При необходимости получения процесса регулирования скорости с высокими качественными показателями переходят к замкнутым системам электропривода, в которых воздействие на двигатель обычно осуществляется изменением подводимого к двигателю напряжения, или частоты этого напряжения, или того и другого. Для этой цели служат различные силовые преобразователи постоянного и переменного тока.
Регулирование скорости в количественном отношении характеризуется шестью основными показателями.
1. Диапазон регулирования определяется отношением максимальной ω мах и минимальной скоростей ω мин: Д = ω мах / ω мин при заданных пределах изменения нагрузки на валу двигателя.
Различные рабочие машины требуют разных диапазонов регулирования. Так, прокатные станы характеризуются диапазоном Д = 20 - 50, станки от Д = 3 - 4 до Д = 50 - 1000 и более, бумагоделательные машины Д = 20 и т.д.
2. Направление регулирования скорости определяется расположением получаемых искусственных характеристик относительно естественной. Если они располагаются выше естественной, то говорят о регулировании скорости вверх от основной, если ниже – вниз от основной. Расположение искусственных характеристик как выше, так и ниже естественной обеспечивает так называемое двухзонное регулирование.
3. Плавность регулирования скорости определяется числом получаемых в данном диапазоне искусственных характеристик: чем их больше, тем регулирование скорости будет осуществляться плавнее. Плавность оценивается коэффициентом, который находится как отношение скоростей на двух ближайших характеристиках
kпл = ω i - ω i-1,
где ω i иω i-1 – скорости на i-й и (i-1) искусственных характеристиках.
Наибольшая плавность достигается в замкнутых системах с использованием преобразователей напряжения и частоты, небольшая плавность обычно соответствует параметрическим способам регулирования. При плавном регулировании скорости качественно протекает технологический процесс, улучшается качество выпускаемой продукции, повышается производительность работы электропривода и т.д.
4. Стабильность в поддержании заданной регулировочной скорости технологом зависит от жесткости механической характеристики электродвигателя. Более жесткую механическую характеристику возможно получить только в замкнутых электроприводах. В разомкнутом электроприводе и при слишком пониженной скорости и колебаниях момента сопротивления будут происходить большие колебания скорости, что недопустимо.
5. Допустимая нагрузка на двигатель при регулировании скорости зависит от протекающего тока в силовой части. Этот ток не должен превышать номинального значения. В противном случае двигатель будет перегреваться. Допустимый ток зависит от вида механической характеристики исполнительного органа и примененного способа регулирования скорости.
6. Экономичность регулирования определяется капитальными и эксплуатационными затратами на регулируемый электропривод. Капитальные затраты должны быть по возможности минимальными, или в противном случае такими, чтобы срок окупаемости электропривода не превысил нормативного.
При расчете показателя экономичности регулирования скорости учитываются количество регулируемых скоростей в диапазоне регулирования, активные мощности на валу двигателя при различных скоростях, потери мощности при различных скоростях, время работы электродвигателя на каждой регулируемой скорости, активные и реактивные мощности, потребляемые электродвигателем.