Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Переключатель выбора
|
|
режимов эксплуатации TP HOLD TP HOLD SHIFT Deadmen E-Stop
T1 Вкл нажать нажать отпустить отпустить нажать
T2 Вкл нажать нажать отпустить отпустить нажать
Auto Выкл нажать нажать нажать
Содержание главы J
Стирание выбора перемещения Страница 2
ACC Страница 3
Offset Страница 7
Offset [PR] Страница 9
Tool-Offset Страница 11
Tool-Offset [PR] Страница 13
PTH Страница 15
SKIP, LBL[ ] Страница 16
Стирание выбора перемещения 
1. Курсор поместить на выбор перемещения(1).
2. F4 [CHOICE]; NO OPTION
 Ускорение (L P[1] 50% FINE ACC)
Ускорение (L P[1] 50% FINE ACC)
ACC
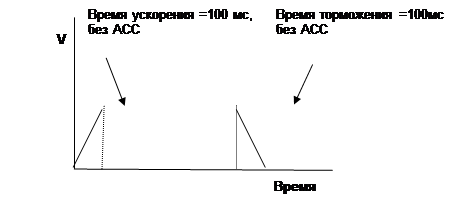
 С помощью ACC время ускорения и торможения движения робота увеличивается или сокращается.
С помощью ACC время ускорения и торможения движения робота увеличивается или сокращается.
Разрешенное значение лежит в пределах, заданных в меню Config.
Значение 50% означает, что среднее ускорение/замедление составляет лишь половину от стандартной установки, и роботу требуется удвоенное время для для ускорения или торможения.
При меньших значениях времени ускорения и замедления сокращается суммарное время перемещения.
Таким образом перемещение можно оптимизировать.
Продолжение на следующей странице.
Вставка ACC(Характеристика ускорения)
Пример: Вставка ACC
|
1. Установить курсор за FINE или CNT
2. F4 [CHOICE]. ACC
3. За ACC ввести значение и нажать Enter.
 Стирание выбора
Стирание выбора
1. Курсор поместить на выбор ускорения(3).
2. Нажать F4 (CHOICE)
3. Нажать клавишу 1 (No Option), выбор отменяется.
Примечания
Команда Offset с Offset Condition
Команда Offset меняет данные позиционирования, запрограммированные в целевой позиции на величину, заданную в регистре позиций, и перемещает робот в измененную позицию.
Условия для Offset специфицируются с помощью OFFSET CONDITION.
Пример:
1: OffsetCondition, PR[1] (см. Инструкцию, Глава K)
2: J P[1] 100% FINE
3: J P[2] 100% FINE Offset
4: J P[3] 100% FINE
|
Вставка Offset
1. Установить курсор за FINE или CNT
2. F1 [INST]: Offset/Frames
Примечания
Команда Offset PR[ ]
Команда на прямой offset изменяет даные позиционирования с помощью значения, заданного в регистре позиций. Нет необходимости использовать команду Offset Condition.
Пример: (другие примеры см. Главу K)
1: J P[1] 100% FINE
2: J P[2] 100% FINE Offset PR[1]
3: J P[3] 100% FINE
|
Вставка Offset
1. Установить курсор за FINE или CNT
2. F1 [INST]: Offset PR[ ]
Примечания
Команда Tool-Offset с Offset Condition
Команда Tool Offset изменяет запрограммированные даные позиционирования для целевой позиции на величину, записанную в регистре позиций, специфицированном в Tool Offset Condition в направлении координат инструмента.
Пример:
1: Tool-Offset Condition, PR[1] (см. Инструкцию, Глава K)
2: J P[1] 100% FINE
3: J P[2] 100% FINE Tool-Offset
4: J P[3] 100% FINE
|
Вставка Tool-Offset
1. Установить курсор за FINE или CNT
2. F1 [INST]: Tool_Offset;
Примечания
Команда Tool-Offset PR[ ]
Прямое задание Tool-Offset без использования Tool-Offset Condition.
Пример: (другие примеры см. Главу K)
1: J P[1] 100% FINE
2: J P[2] 100% FINE Tool-Offset PR[1]
3: J P[3] 100% FINE
ВставкаTool-Offset PR[ ]
|
1. Установить курсор за FINE или CNT
2. F1 [INST]: Tool_Offset PR[ ];
Примечания
Команда PTH
Эта функция предназначена для улучшения параметров непрерывного перемещения (тип перемещения CNT 1- CNT 100), если рабочий орган робота перемещается на небольшие расстояния.
Пример:
1: J P[1] 100% CNT 100
2: J P[2] 100% CNT 100 PTH
3: J P[3] 100% CNT 100
Вставка PTH
1. Установить курсор за FINE или CNT
2. F1 [INST]: PTH;
Skip, LBL [ ]
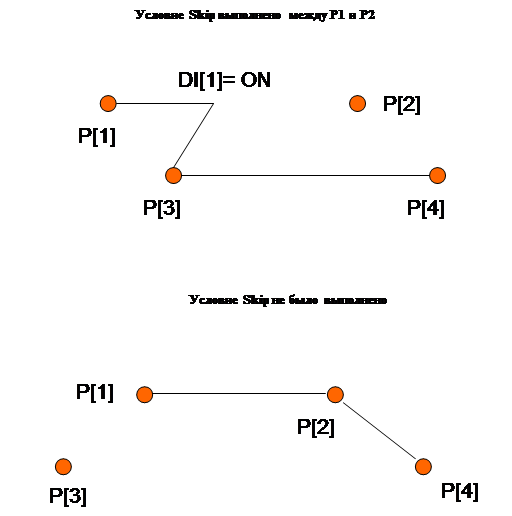 |
Выбор перемещения Skip LBL[x] изменяет ход программы в зависимости от того, выполнено ли предварительно заданное условие или нет. Условие Skip определяется с помощью команды SKIP CONDITION (см. Главу K).
Выполнение команды перемещения, содержащей выбор Skip, LBL осуществляется следующим образом:
Если условие SKIP выполнено: перемещение, определяемое командой прерывается, и выполняется следующая команда.
Если условие SKIP не выполнено: перемещение, определяемое командой, выполняется. Когда робот достигнет целевой позиции, а условие все еще не выполнено, то программа закончится на метке LBL[x].
Пример:
Skip Condition DI[1]= ON
J P[1] 100% FINE
 J P[2] 100% FINE Skip, LBL[1] (если не выполнено)
J P[2] 100% FINE Skip, LBL[1] (если не выполнено)
J P[3] 100% FINE
LBL[1]
J P[4 100% FINE