Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Кинематические, расчетные и структурные схемы механической части электропривода
|
|
Кинематические схемы дают представление о связи ротора двигателя с рабочим органом. В качестве связи выступают ременные, цепные, механические передачи и т.п.
Кинематические схемы изображаются по ГОСТ. Пример изображения некоторых элементов изображены на рисунке 2.5.
Рисунок 2.5. Элементы кинематических схем электропривода: электродвигатель (а); вал (б); редуктор (в)
Рассмотрим электропривод центробежного вентилятора №6. Изобразим общий вид вентилятора и укажем его основные элементы.

Рисунок 2.6. Общий вид центробежного вентилятора №6: 1) электродвигатель; 2)ведущий шкив; 3) ременная передача; 4) ведомый шкив; 5) рабочее колесо вентилятора
Кинематическую схему электропривода центробежного вентилятора изобразим на рисунке 2.7, используя условные обозначения элементов электропривода.

Рисунок 2.8. Кинематическая схема вентилятора №6
Расчетная схема механической части привода нужна для определения приведенного момента инерции электропривода. Составляется исходная расчетная схема, где в виде кружков (10мм) изображаются моменты инерции всех вращающихся частей, иногда учитывают жесткость элементов, которые изображаются в виде пружины (чем меньше жесткость, тем длиннее пружина).
На рисунке 2.10 изображена исходная расчетная схема механической части электропривода. Каждый вращающиеся элемент кинематической схемы имеет свой момент инерции. В общем виде он определяется по формуле:
 (2.4)
(2.4)
где m – масса вращающегося тела, кг;
ρ – радиус инерции, м.
Рисунок 2.8. Исходная расчетная схема механической части электропривода
Приведение моментов инерции вращающихся частей выполняются по формуле:
 (2.5)
(2.5)
В нашем случае приведенный момент инерции вращающихся частей, расположенных на втором валу, рассчитывается по формуле:
 (2.6)
(2.6)
Общий, приведенный к валу электродвигателя момент инерции есть сумма всех моментов инерции, действующих в нашем случае в электроприводе:
 (2.7)
(2.7)
где  – момент инерции ротора двигателя, кгм2;
– момент инерции ротора двигателя, кгм2;
 – момент инерции вращающегося шкива, кгм2.
– момент инерции вращающегося шкива, кгм2.
Моменты, действующие на втором валу приводятся к валу двигателя по формуле:
 (2.8)
(2.8)
где  - передаточное число передачи;
- передаточное число передачи;
 - КПД передачи.
- КПД передачи.
Если в приводе есть поступательное движение со скоростью  и массой m, то момент инерции привода определяется по формуле:
и массой m, то момент инерции привода определяется по формуле:
 (2.9)
(2.9)
Если в приводе действует сила F при поступательном движении со скоростью  , то приведенный к валу двигателя момент сопротивления движению определяется по формуле:
, то приведенный к валу двигателя момент сопротивления движению определяется по формуле:
 (2.10)
(2.10)
В общем виде формула приведения моментов инерции имеет вид:
 (2.11)
(2.11)
Где  - сумма моментов инерции находящихся на валу двигателя, кгм2;
- сумма моментов инерции находящихся на валу двигателя, кгм2;
 - сумма приведенных моментов инерции вращающихся частей электропривода, находящихся на других валах двигателя, кгм2;
- сумма приведенных моментов инерции вращающихся частей электропривода, находящихся на других валах двигателя, кгм2;
 - сумма приведенных моментов инерции движущихся поступательно частей электропривода;
- сумма приведенных моментов инерции движущихся поступательно частей электропривода;
 - скорость вращения электродвигателя, рад/с.
- скорость вращения электродвигателя, рад/с.
Структурная схема механической части привода составляется на базе расчетных схем. Они позволяют определить передаточные функции механической части. Составим структурную схему одномассовой схемы на рисунке 2.9:
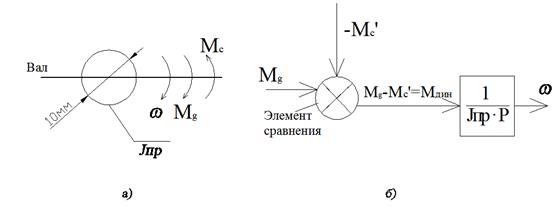
Рисунок 2.9. Одномассавая приведенная расчетная схема механической части электропривода (а) и ее структурная схема (б)
Для двухмассовой расчетной схемы структурная схема сложнее си содержит три элемента сравнения и три передаточные функции.
Передаточная функция структурной схемы рисунка 2.9 имеет вид:
 (2.12)
(2.12)
где Р –оператор Лапласа (или оператор дифференцирования).