Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Характеристики трехфазных асинхронных двигателей
|
|
Асинхронный двигатель с короткозамкнутым ротором имеет на статоре три обмотки, оси которых сдвинуты в пространстве на  . Протекающие через них трехфазные токи также сдвинуты по фазе на 120 эл.градусов. Эти условия создают вращающееся электромагнитное поле, которое характеризуется постоянной амплитудой (постоянной величиной) и постоянной скоростью
. Протекающие через них трехфазные токи также сдвинуты по фазе на 120 эл.градусов. Эти условия создают вращающееся электромагнитное поле, которое характеризуется постоянной амплитудой (постоянной величиной) и постоянной скоростью  , которая называется синхронной скоростью.
, которая называется синхронной скоростью.
 . (3.13)
. (3.13)
где p – число пар полюсов;
f – частота тока, 50 Гц.
Если р = 1, то  рад/с; р = 2, то
рад/с; р = 2, то  рад/с; р = 3, то
рад/с; р = 3, то  рад/с; р = 4, то
рад/с; р = 4, то  рад/с.
рад/с.
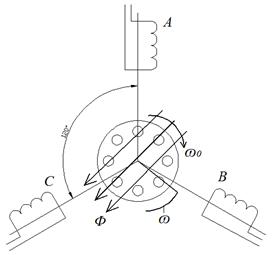
Рисунок 3.12. К вопросы о принципе работы асинхронного двигателя.
Поле статора пересекает ротор и наводит в обмотке ротора ЭДС. При замкнутом роторе возникает ток. Взаимодействие активной составляющей этого тока с полем вызывает момент двигателя:
 . (3.14)
. (3.14)
где  - активная составляющая тока ротора;
- активная составляющая тока ротора;
kФ – электромагнитное вращающееся поле статора.
Под действием момента ротора асинхронного двигателя вращается со скоростью ω, причем ω < ω 0. Относительная разность этих скоростей выражается соотношением:
 . (3.15)
. (3.15)
При ω =ω 0 скольжение S=0. Если ω =0, то S=1. Если ω > ω 0 (что не может быть в двигателе, его ротор вращает сторонняя сила), то скольжение становится отрицательным, а двигатель переходит в генераторный режим. Если ω будет отрицательной, т.е. ротор заставят вращаться против поля, то S> 1, это режим электромагнитного тормоза (рисунок 3.13).
Угловая скорость ротора находится по формуле:
 . (3.16)
. (3.16)
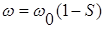
Для нахождения основных зависимостей воспользуемся «Г»-образной схемой замещения, изображенной на рисунке 3.14.
Рисунок 3.14. Упрощенная «Г» - образная схема замещения однофазной обмотки асинхронного электродвигателя.
Это схема известна из курса электрических машин. На схеме рисунка 3.14 r0, X0 – активное и индуктивное сопротивление контура намагничивания; Х1, Х2’ – приведенные индуктивные сопротивления рассеяния статора и ротора; r1, r2’ – приведенные активные сопротивления обмотки статора и ротора; I1 – фазный ток статора; I0 – ток намагничивания; I2’ – приведенный ток ротора.
Из схемы рисунка 3.13 следует, что ток ротора определяется по закону Ома выражением:
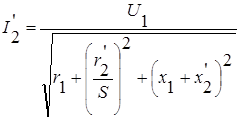 . (3.17)
. (3.17)
Из выражения (3.17) следует, что ток зависит от напряжения, от параметров обмотки статора и ротора, от скольжения ротора. Если взять производную от тока I2’ по скольжению S и прировнять к нулю, т.е.  , то можно найти значение скольжения, при котором ток ротора (и, следовательно, ток статора), максимальный. Это значение скольжение составляет
, то можно найти значение скольжения, при котором ток ротора (и, следовательно, ток статора), максимальный. Это значение скольжение составляет  .
.
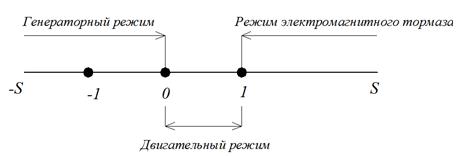
Рисунок 3.13. Режимы работы асинхронной машины.
Отрицательное значение скольжения указывает на его генераторный режим. На рисунке 3.15 изображено изменение тока ротора и статора от величины скольжения во всех режимах его работы.
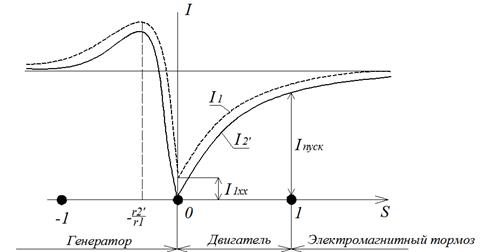
Рисунок 3.15. Изменение токов ротора и статора асинхронного двигателя при разных режимах работы.
Из этого рисунка следует, что в режиме электромагнитного тормоза токи выше, чем пусковые, и что в генераторном режиме при скольжении  , наблюдается максимальный ток двигателя.
, наблюдается максимальный ток двигателя.
Обычно электромеханическая характеристика изображается в виде  . В двигательном режиме она имеет вид рисунка 3.16. Пучковой ток больше номинального в 3, 5 – 7, 5 раз, где меньшее значение соответствует малым по мощности двигателям.
. В двигательном режиме она имеет вид рисунка 3.16. Пучковой ток больше номинального в 3, 5 – 7, 5 раз, где меньшее значение соответствует малым по мощности двигателям.
В двигательном режиме кривая тока будет иметь вид:
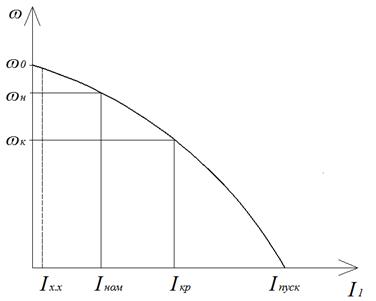
Рисунок 3.16. Электромеханическая характеристика асинхронного двигателя.
Чтобы найти уравнение механической характеристики асинхронного электродвигателя, воспользуемся уравнениями потери мощности в роторе:
 . (3.18)
. (3.18)
 . (3.19)
. (3.19)
Из уравнения (3.18):
 . (3.20)
. (3.20)
Подставим в (3.20) значение потерь из уравнения (3.19):
 . (3.21)
. (3.21)
Подставим в (3.21) значение тока из уравнения (3.17). Получим уравнение момента асинхронного двигателя, выраженное через параметры:
 . (3.21)
. (3.21)
Из уравнения (3.21) следует что:
1)  ;
;
2) M зависит от параметров обмотки  ,
,  ,
,  ,
,  ;
;
3)  .
.
Установим скольжение, при котором момент максимальный. Для этого возьмём производную момента по скольжению и прировняем ее к нулю, т.е.  . Получим скольжение, которое называется критическим. Оно равно:
. Получим скольжение, которое называется критическим. Оно равно:
 . (3.22)
. (3.22)
Если это значение скольжения подставить в формулу (3.21), то получим уравнения критического момента:
 . (3.23)
. (3.23)
Из уравнения (3.23) видно, что критический момент не зависит от сопротивления ротора. Для двигательного режима момент меньше, чем для генераторного режима, поскольку в двигательном режиме подставляется Sк положительное уравнение (3.22) и в уравнении (3.23) знак перед r1 берется +.
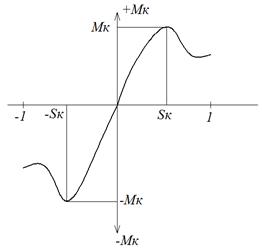
Рисунок 3.17. Зависимость момента от скольжения асинхронной машины в двигательном и генераторном режимах.
Для практического пользования используют уточненную формулу Клосса, которая получена при делении момента двигателя уравнения (3.21), на момент критический уравнение (3.23):
 . (3.24)
. (3.24)
 . (3.25)
. (3.25)
где E – коэффициент для двигателей, у которых  достаточно мало, E
достаточно мало, E  0 и момент выражается упрощенной формулой Клосса:
0 и момент выражается упрощенной формулой Клосса:
 . (3.26)
. (3.26)
Зависимость  изображено на рисунке 3.17.
изображено на рисунке 3.17.
Механическая характеристика электродвигателей строится упрощенно точно по уравнению 3.24. Значение  , Sк и Мк задаются в справочнике.
, Sк и Мк задаются в справочнике.
Механическую характеристику строят по 5 точкам, в координатах ω – М (рисунок 3.18).
Точка 1 соответствует ω = 0,  ,
,
 . (3.27)
. (3.27)
где  (Н
(Н  м). (3.28)
м). (3.28)
 . (3.29)
. (3.29)
где Sн – номинальное скольжение.
Если в справочнике задано номинальная частота вращения n (об/мин), то:
 (рад/с). (3.30)
(рад/с). (3.30)
Точка 2 соответствует минимальному моменту Ммин при пуске и минимальной скорости ω н. Значение кратности тока μ мин задано в справочнике по электрическим машинам, а ω мин соответствует скорости 0.15ω 0. Именно при этой скорости наблюдается провал момента при пуске от действия высших гармоник момента (пятой и седьмой).
 . (3.31)
. (3.31)
 . (3.32)
. (3.32)
Точка 3 соответствует критическому моменту Мк и критической скорости ω к. В справочнике по электрическим машинам задаются μ к и Sк. Тогда:
 . (3.33)
. (3.33)
 . (3.34)
. (3.34)
Если Sк не задан в справочнике (для старых серий деталей), то его находят по формуле:
 . (3.35)
. (3.35)
Для крупных двигателей ( 2, 2 кВт) критическое скольжение находят по формуле:
2, 2 кВт) критическое скольжение находят по формуле:
 . (3.36)
. (3.36)
Точка 4 соответствует номинальному режиму (Мн, Sн).
Точка 5 соответствует синхронной скорости (ω 0 находится по уравнению (3.31), а момент М=0).
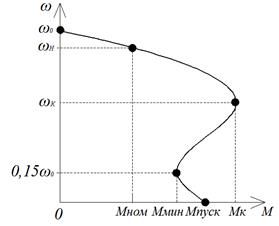
Рисунок 3.18. Механическая характеристика асинхронного двигателя и ее 5 характерных точек.