Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Характеристики двигателей постоянного тока (ДПТ)
|
|
Двигатели постоянного тока имеют якорь и обмотку возбуждения. На рисунке 3.1 изображена упрощенная конструкция ДПТ (не указана станина, обмотки дополнительных полюсов, магнитопровод и т.п.)
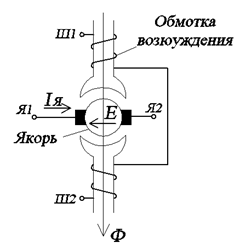
Рисунок 3.1. Упрощенное изображение конструкции ДПТ: Я1-Я2 – выводы обмотки якоря; Ш1- Ш2 – обмотки возбуждения
В зависимости от того, как включаются эти обмотки, различают ДПТ: параллельного возбуждения; независимого возбуждения; последовательного возбуждения; смешенного возбуждения (рисунок 3.2).
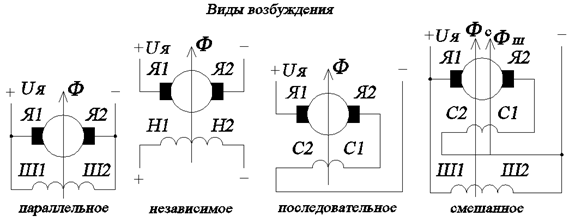
Рисунок 3.2. Принципиальные электрические схемы включения основных обмоток ДПТ различных систем возбуждения
Момент двигателя получается в результате взаимодействия поля Ф и тока якоря Iя:
 . (3.1)
. (3.1)
где k – коэффициент пропорциональности.
При вращении якоря со скоростью ω в магнитном поле Ф в его обмотке индуктируются ЭДС, направленная на встречу напряжению.
 . (3.2)
. (3.2)
Таким образом, напряжения Uя уравновешивается ЭДС E и падению напряжения на обмотке якоря:
 . (3.3)
. (3.3)
где Rя -сопротивление обмотки якоря, Ом.
При нулевой скорости якоря  , в нем не индуктируется ЭДС, и тогда:
, в нем не индуктируется ЭДС, и тогда:
 . (3.4)
. (3.4)
 . (3.5)
. (3.5)
Из этого выражения определяется пусковой ток коря. Поскольку Rя мало, то пусковой ток получается большой  .
.
Двигатели в электроприводе характеризуются двумя характеристиками:  – электромеханическая характеристика;
– электромеханическая характеристика;  – механическая характеристика.
– механическая характеристика.
Установим уравнение электромеханической характеристики для двигателей постоянного тока независимого возбуждения для которых  .
.
Подставим уравнения (3.2) в (3.3):
 . (3.6)
. (3.6)
Из этого уравнения найдем значение скорости:
 . (3.7)
. (3.7)
Это есть уравнение электромеханической характеристики. Скорость ω 0 называется скоростью идеального холостого хода:
 . (3.8)
. (3.8)
Уравнение (3.7) есть уравнение прямой линии, которая проводится между точками ω 0 и Iя.пуск. Рабочая часть характеристики находится между точками ω 0 и N (рисунок 3.3):

Рисунок 3.3. Электромеханическая и механическая характеристики ДПТ параллельного или независимого возбуждения
Чтобы получить уравнение механической характеристики, подставим в уравнение (3.7) значение тока из уравнения (3.1). Получим:
 . (3.9)
. (3.9)
Уравнение (3.9) есть также уравнение … линии которая проходит между точками ω 0 и Mпуск. При соответствующем выборе масштаба механическую и электромеханическую характеристики можно изобразить одной линией (рисунок 3.3).
В двигателях последовательного возбуждения, ток якоря создает магнитный поток возбуждения, поэтому  , и моменты, развиваемый двигателем пропорционален квадрату тока
, и моменты, развиваемый двигателем пропорционален квадрату тока  . Это значительно усложняет аналитический расчет электромеханической и механической характеристик.
. Это значительно усложняет аналитический расчет электромеханической и механической характеристик.

Рисунок 3.4. Зависимость момента двигателя от тока якоря для ДПТ последовательного и параллельного возбуждения
Для расчета электромеханической и механической характеристик ДПТ последовательного возбуждения пользуются универсальными характеристиками изображенными на рисунке 3.5.
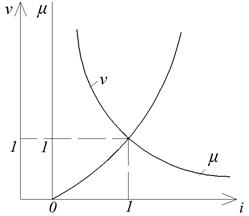
Рисунок 3.5. Примерный вид универсальных характеристик ДПТ последовательного возбуждения
Универсальные характеристики задаются в относительных единицах в осях μ – i b и ν – i:
 ,
,  ,
,  , (3.10)
, (3.10)
где  ,
,  ,
,  – момент, скорость, ток при номинальной нагрузке;
– момент, скорость, ток при номинальной нагрузке;
 ,
,  ,
,  – текущее значения момента, скорости и тока.
– текущее значения момента, скорости и тока.
Для построения механической и электромеханической характеристики задаемся относительным значением тока i1, i2, i3 и т.д., и находят по графикам относительные значения скорости ν 1, ν 2, ν 3 и т.д., а также относительные значения момента μ 1, μ 2, μ 3 и т.д. Эти значения записывают по форме таблица 3.1.
Таблица 3.1
| В относительных единицах | В именованных значениях | ||||
| токи | скорости | моменты | Iя, А | ω, рад/с | M, Нм |
| i1 | ν 1 | μ 1 | |||
| i2 | ν 2 | μ 2 | |||
| i3 | ν 3 | μ 3 |
Далее по (3.10) вычисляют  ;
;  и
и  . Электромеханическую характеристику строят по данным ω и Iя, а механическую – по данным ω и M. Их примерный вид изображен на рисунке 3.6.
. Электромеханическую характеристику строят по данным ω и Iя, а механическую – по данным ω и M. Их примерный вид изображен на рисунке 3.6.

Рисунок 3.6. Электромеханическая (а) и механическая (б) характеристики ДПТ последовательного возбуждения
Особенностью этих характеристик является то, что они не пересекаются со скоростью ω, т.е. не имеют скорости идеального холостого хода ω 0, следовательно, и генераторного торможения. Их скорость при малой нагрузке увеличивается в 3 – 5 раз, поэтому без нагрузки их нельзя эксплуатировать. В тоже время их механическая характеристика была принята для транспортных устройств.
У двигателя смешенного возбуждения параллельная обмотка создает поле, направление согласно с полем последовательной обмотки, поэтому при малом токе якоря скорость двигателя определенная, соответствует скорости идеального холостого хода. Характеристики механическая и электромеханическая пересекаются с осью скорости (рисунок 3.7б и 3.7в).
В связи с нелинейностью момента таких двигателей от тока, создаваемой последовательной обмоткой возбуждения, аналитическое выражение для механических и электромеханических характеристик получить затруднительно. Поэтому заводы – изготовители задают их в виде универсальных характеристик (рисунок 3.7а).
Преимущество таких электродвигателей при одном и том же токе якоря они создают больший момент, чем двигатели параллельного возбуждения.
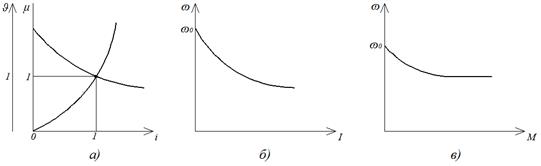
Рисунок 3.7 Универсальные характеристики (а), электромеханическая (б) и механическая (в) характеристики смешенного возбуждения