Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Виды статических моментов
|
|
Уравнения движения электропривода.
На практике часто приходится иметь дело с механическими системами движущимися поступательно. В этом случае силу, которую необходимо приложить к исполнительному органу электропривода, можно в общем случае рассчитать по формуле
при поступательном движении:
F = Fc ± Fd = Fc ± ma (1)
где: F – движущая сила
Fc – сила статического сопротивления.
Fd – динамическая сила
m – масса поступательно движущихся частей
a – ускорение или замедление.
Знаки «плюс» и «минус» отражают случаи, когда момент создаваемый приводом является двигательным или тормозным.
В приведенном уравнении силы измеряются в Н, масса – в кг, скорость – в м/с, время - в сек.
В тех случаях когда электрическая машина совершает вращательное движение приходится иметь дело не с «силой» а с движущим моментом, для такого случая общая формула расчета принимает вид
при вращательном движении:
M = Mc ± Md = Mc ± Je (2)
где: M – вращающий момент на валу двигателя, Н
Mc – момент статического сопротивления, Н∙ м;
Md – момент динамического сопротивления, Н∙ м;
J – момент инерции вращающейся системы, Нм∙ сек2;
e – угловое ускорение или замедление вала двигателя.
ВИДЫ СТАТИЧЕСКИХ МОМЕНТОВ
 Рабочая машина предназначена для совершения полезной работы, т. е. для преодоления полезных сил сопротивления, но одновременно с этим преодолевает и вредные силы сопротивления, создаваемые силами трения. Потери на трение в движущихся частях рабочей машины учитываются коэффициентом полезного действия по формуле
Рабочая машина предназначена для совершения полезной работы, т. е. для преодоления полезных сил сопротивления, но одновременно с этим преодолевает и вредные силы сопротивления, создаваемые силами трения. Потери на трение в движущихся частях рабочей машины учитываются коэффициентом полезного действия по формуле
| (3) |
где: Рм — полная мощность на валу рабочей машины с учетом потерь на трение; Рм.п —мощность на валу рабочей машины, идущая на совершение полезной работы; η – К.П.Д. рабочей машины.
Иногда вместо К.П.Д. в формуле потери от вредных сопротивлений можно учитывать завышением полезной мощности на фиктивную добавочную величину, пропорциональную этим потерям. Так, например, в подъемных установках трение в направляющих и сопротивление воздуха в стволе можно учитывать увеличением полезной массы на некоторую фиктивную величину.
Мощность на валу рабочей машины создается моментом нагрузки и угловой скоростью. Момент же нагрузки, создаваемый рабочей машиной, может быть направлен как встречно, так и согласно с направлением угловой скорости двигателя. В первом случае этот момент препятствует движению, во втором случае— способствует. Момент рабочей машины, пересчитанный на частоту вращения двигателя, называется приведенным статическим моментом. В уравнении (2) он обозначен через Мс. Момент статических сопротивлений может быть реактивным и активным.
Реактивный момент —это момент, создаваемый силами трения, изгиба, кручения, смятия неупругих тел. Действие этого момента всегда встречно движению.
Активный момент —это момент, создаваемый массой поднимаемого груза, силами сжатия, изгиба, кручения упругих тел, т.е. их действие связано с изменением потенциальной энергии отдельных элементов электрифицированного агрегата. Направление действия активного момента одностороннее, например, при подъеме груза он препятствует движению, а при опускании – способствует. Таким образом, активный момент с изменением направления движения своего знака не меняет.
Работа электрифицированного агрегата в режимах пуска, торможения, при переходе с одной скорости на другую зависит
| Рис. 1.1. Механические характеристики рабочих машин |
от характера изменения вращающего момента двигателя и статического момента рабочей машины, являющегося функцией угловой скорости. Причем статический момент зависит не только от угловой скорости, но и от времени или пути, а также может оставаться без изменения.
 Опыт эксплуатации различных рабочих машин и механизмов показал, что их статические моменты могут быть выражены формулой
Опыт эксплуатации различных рабочих машин и механизмов показал, что их статические моменты могут быть выражены формулой
| Мс = Мтр + (хМс – Мтр) |
| (4) |
где: Мтр —момент, создаваемый силами трения в движущихся частях рабочей машины; Мс.ном —номинальный статический момент при номинальной скорости; ω, ω ном —текущая и номинальная угловые скорости; а — коэффициент, характеризующий изменение момента сопротивления с изменением угловой скорости; х— коэффициент загрузки.
Согласно формуле (4) часть рабочих машин можно классифицировать на следующие категории.
В первую категорию входят рабочие машины, у которых статический момент постоянен и не зависит от скорости. Коэффициент а в этом случае равен нулю. Такую характеристику имеют, например, ленточные, скребковые, канатные конвейеры при постоянном количестве груза на них, лебедки и другие механизмы. На рис. 1.1 этому случаю соответствует прямая 1.
Во вторую категорию входят рабочие машины, у которых статический момент зависит от угловой скорости, т.е. Мс =f(l). Для одних рабочих машин такая зависимость прямолинейная, т. е. а=1 (рис. 1.1, кривая 2), для других—параболическая, т. е. а=2 (рис. 1.1, кривая 3). Последнюю зависимость имеют вентиляторы и центробежные насосы.
В третью категорию входят рабочие машины, у которых статический момент зависит от пути, т. е. Мс =f(l) Такую зависимость имеют качающиеся конвейеры, поршневые компрессоры и насосы, опрокидыватели и др.
В четвертую категорию входят рабочие машины, у которых статический момент зависит одновременно от угловой скорости и пути, т.е. Мс =f(ω, l). Такую характеристику имеет рельсовый транспорт, так как сопротивление движению подвижного состава зависит:
| Рис. 1.2. Случайный характер изменения статического момента во времени |
а) от сопротивления трения при движении состава по горизонтальному и прямолинейному пути и от сопротивления воздуха, являющегося функцией угловой скорости, т. е. Мс =f1(ω);
б) от дополнительных сопротивлений движению на подъемах и на кривых, зависящих от местонахождения состава или пройденного пути, т.е. Mc=f2(l).
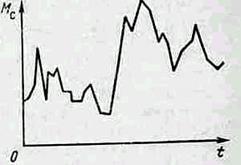 В пятую категорию входят рабочие машины, у которых изменения статического момента в силу производственных особенностей носят случайный характер в функции времени, т. е. Мс=f(t) (рис. 1.2). Такая зависимость характерна для добычных и проходческих машин. Для отдельных участков забоя значение моментов сопротивления определяется из уравнения
В пятую категорию входят рабочие машины, у которых изменения статического момента в силу производственных особенностей носят случайный характер в функции времени, т. е. Мс=f(t) (рис. 1.2). Такая зависимость характерна для добычных и проходческих машин. Для отдельных участков забоя значение моментов сопротивления определяется из уравнения
Mc = mz(t)+ M(f), (5)
где mz(t) —математическое ожидание величины моментов сопротивления разрушению на данном участке забоя; M(f)— составляющая, характеризующая изменение моментов сопротивления исполнительному органу, связанных с изменением крепости угля и динамикой работы исполнительного органа.