Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Моделирование погрешностей измерительных систем
|
|
Человек своими органами чувств воспринимает лишь некоторые явления. Поэтому для восприятия измерительной информации человеком должны быть применены измерительные средства, которые, реагируя на исследуемое явление, преобразуют измеряемую величину в вид инфор-мации, доступной органам чувств человека (см. рис. 2.1).
Применительно к измерительным системам моделируются характерис-тики и свойства измерительной системы, свойства элементов измеритель-ной системы, источники внешних и внутренних погрешностей.
Поскольку погрешности модели увеличивают недостоверность исследу-емого явления, то в метрологии, как правило, используются явления, кото-рые могут быть описаны с точностью не хуже 10– 2 – 10– 6, а при организации эталонов и образцовых мер – с точностью, превышающей 10– 8 – 10– 12.
При моделировании погрешностей необходимо учитывать реальные свойства конструктивных элементов СИ. Эти элементы подвержены ста-рению и износу, а изменения их свойств (качеств) носят, как правило, случайный нестационарный характер (см. п.3.1). Однако часто погрешности некоторых СИ могут описываться стационарными процессами. Например, образцовый измерительный прибор магнитоэлектрического типа может иметь пренебрежимо малую систематическую погрешность с постоянной дисперсией, что и позволяет представить эти погрешности как стацио-нарный процесс (3.2) – (3.5).
Рассмотрим в качестве примера один из методов (модель), с помощью которого выявляются источники погрешностей рычажно-зубчатого индика-тора (индикатора часового типа) [24].
Конструктивная и кинематическая схемы прибора приведены на рис. 5.1. Главной частью индикатора является металлический корпус 1, передняя часть которого закрыта стеклом. Под стеклом имеется шкала с делениями, в центре которой насажена стрелка 2. В пределах большой шкалы имеется малая шкала 3 с центральной стрелкой. Сквозь корпус проходит металли-ческий стержень(щуп) 7, который может перемещаться (как это показано на рис. 5.1 стрелкой). На средней части стержня нарезаны канавки, в которые входят зубцы малой шестеренки 3. На ось этой шестеренки насажена шес-теренка бо́ льшего диаметра 4, связанная с нижележащей маленькой шестерен-кой 6, на оси которой насажена большая стрелка 2.
Во избежание появления люфта в конструкции прибора предусмотрена дополнительная шестеренка 8, находящаяся в зацеплении с шестеренкой 6. Спиральная пружина 9, связанная с шестеренкой 8, все время поддер-живает стержень 7 в крайнем (нижнее по рис. 5.1) положении и обеспечи-вает постоянное безлюфтовое зацепление зубьев шестеренок. Измеряемый размер q переносится на измерительный орган прибора, приводя в движе-ние все шестеренки и одновременно обе стрелки.
При прекращении воздействия q щуп возвращается в прежнее положе-ние. Конец щупа индикатора 5, в который запрессован стальной шарик, устанавливают в точке конструкции, перемещение q которой необходимо измерить. Передвижению конца стержня на 1 мм соответствует поворот большой стрелки на 360˚. Число делений большой шкалы равно 100, сле-довательно, одно деление шкалы соответствует перемещению конца щупа на 0, 01 мм.
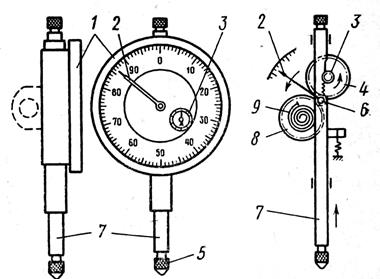
Рис. 5.1. Внешний вид и кинематическая схема индикатора часового типа
Определение погрешности показаний индикаторов часового типа – довольно сложная метрологическая задача. Эта погрешность может быть описана двойным (бимодальным) распределением вероятностей, возни-кающим в результате наложения двух нормальных распределений  и
и  , смещенных одно относительно другого на величину гистерезиса (вариации) h, вызванного зазорами и ошибками в конструктивных элементах прибора (рис. 5.2).
, смещенных одно относительно другого на величину гистерезиса (вариации) h, вызванного зазорами и ошибками в конструктивных элементах прибора (рис. 5.2).
f (W)=F [(→ Δ qi); (← Δ qi)]

 | |||
 |


 (→ Δ qi), (← Δ qi)
(→ Δ qi), (← Δ qi)


 σ 1 h σ 2
σ 1 h σ 2
Рис. 5.2. Распределение вероятности погрешностей рычажно-зубчатого индикатора
(индикатора часового типа)
Параметрами распределения являются: σ 1, σ 2 – дисперсии стандартных отклонений составляющих распределений;
h – гистерезис (вариация) измерений.
Исходная модель многомерна; она включает несколько входных (поряд-ка 7) и 3 выходные величины, причем в качестве входных, определяющих источники погрешностей индикатора, выбраны конструктивные параметры прибора:
1) деформации и проскальзывания при движении измерительного штока 7; параметром, характеризующим эти источники погрешности, является раз-мер шарика наконечника 5;
2) трение в подшибнике зубчатого колеса 3, 4; параметры – размер шес-теренки 4;
3) потери энергии, вызванные предварительным напряжением спираль-ной пружины 9; параметры – материал пружины (жесткость, длина, масса);
4) зазоры в подшибнике шестеренки 6; параметры – трение с шесте-ренкой 4, масса и длина индикаторной стрелки;
5) зазоры в подшибниках скольжения измерительного штока 7; параметр – материал втулок подшибников;
6) потери энергии за счет люфта между канавками измерительного штока шестеренкой 3; параметры – дефекты при нарезании канавок и мате-риал шестеренки 3;
7) потери энергии за счет возвратной пружины 10; параметром может быть жесткость пружины 10.
Таким образом, общая статистическая модель погрешности индикатора может быть выражена следующими условиями:


 (5.30)
(5.30)

Требуется проверить следующую гипотезу: зависят ли переменные σ 1, σ 2, h от конструктивных параметров Δ q1, …, Δ q7, выбранных в качестве опреде-ляющих источников погрешностей индикатора.
Результаты измерений, отображенных в пространстве с координатами σ 1, h, σ 2, представлены на рис. 5.3 [24]. Из результатов экспериментов, пред-ставленных здесь, выбраны те точки, для которых исследовано влияние выбранных конструктивных параметров прибора на погрешность (например, перечисленные семь входных величин), которая характеризуется распреде-лением (см. рис. 5.2).
Следует отметить, что такие исследования довольно трудоемки, но они весьма целесообразны в процессе разработки измерительной аппаратуры (например, рассмотренных индикаторов часового типа). Сначала выдвигается гипотеза (строится физическая модель), что данные конструктивные парамет-ры (явления, величины и т. д.) являются источниками погрешности, а затем проводится направленный эксперимент (измерения), результаты которого подтверждают либо отвергают принятую гипотезу.
Для некоторых объектов, либо очень больших, например космические объекты, либо очень малых, например внутриатомные взаимодействия, экспериментальные исследования очень дороги либо вообще невозможны; тогда используются методы моделирования, основанные на подобиях, аналогиях и т. п. (см. пп. 5.2 – 5.4).
Рис. 5.3. Экспериментальные результаты измерения погрешностей
индикатора часового типа [24]
Контрольные вопросы
1. Какие методы применяются в случаях, если прямое измерение сложных физических процессов затруднено, экономически невыгодно, либо вообще невозможно?
2. Что такое модельные эксперименты и чем они характеризуются?
Понятие о коэффициентах подобия. Что такое критерии подобия?
3. Понятие об аналогиях. В каких случаях применяются методы аналогии?
4. Моделирование погрешностей измерительных приборов.
Ч А С Т Ь I I I. ОБЕСПЕЧЕНИЕ ЕДИНСТВА ИЗМЕРЕНИЙ
Имея в виду какое-либо предприятие,
помысли, точно ли оно тебе удастся.
(Козьма Прутков, “ Зри в корень”)
Не измеряй точнее, чем это необходимо
(Неписанный закон метрологов)