Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Плоска система сил
|
|
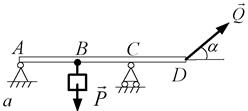
Приклад 3.6. Знайти реакції опор балки  , на яку діє сила
, на яку діє сила  і до якої підвішений вантаж вагою
і до якої підвішений вантаж вагою  (риc. 3.14, а).
(риc. 3.14, а).
а)
б)
Рис. 3.14
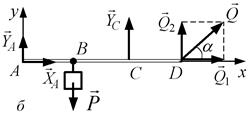
Розв'язання. Зобразимо відомі сили: , вагу  та невідомі реакції опор (шарніра
та невідомі реакції опор (шарніра  та котка
та котка  ), прикладені до балки. Будемо розглядати рівновагу системи: балка – нитка – вантаж. Для плоскої системи сил зобразимо тільки ті сили, що знаходяться в площині рисунка, тобто тільки дві реакції шарніра :
), прикладені до балки. Будемо розглядати рівновагу системи: балка – нитка – вантаж. Для плоскої системи сил зобразимо тільки ті сили, що знаходяться в площині рисунка, тобто тільки дві реакції шарніра :  та
та  . Реакція котка
. Реакція котка  спрямована по нормалі до поверхні балки. Маємо три невідомі сили і три аналітичні умови рівноваги для довільної плоскої системи сил. Отже задача має розв’язок.
спрямована по нормалі до поверхні балки. Маємо три невідомі сили і три аналітичні умови рівноваги для довільної плоскої системи сил. Отже задача має розв’язок.
Запишемо перші два рівняння рівноваги:
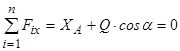 ;
;
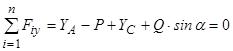 .
.
Більш детально розглянемо третє рівняння – рівняння моментів відносно осі, спрямованої перпендикулярно до площини  . Ця вісь напрямлена на читача і може проходити через будь-яку точку плоскої фігури. Цю точку доцільно вибрати таким чином, щоб через неї проходило якомога більше ліній дії невідомих сил (момент цих сил відносно даної точки дорівнює нулю), – це спрощує запис третього рівняння рівноваги. В даній задачі таких точок дві: точка (через неї проходять лініїдії реакцій
. Ця вісь напрямлена на читача і може проходити через будь-яку точку плоскої фігури. Цю точку доцільно вибрати таким чином, щоб через неї проходило якомога більше ліній дії невідомих сил (момент цих сил відносно даної точки дорівнює нулю), – це спрощує запис третього рівняння рівноваги. В даній задачі таких точок дві: точка (через неї проходять лініїдії реакцій 
лінії
) та  (через неї проходять лінії дії реакцій
(через неї проходять лінії дії реакцій  ). Візьмемо точку , тобто будемо розглядати вісь
). Візьмемо точку , тобто будемо розглядати вісь  , яка напрямлена на читача (звичайно вісь не зображують). Сили , перетинають вісь , тому моменти цих сил відносно осі дорівнюють нулеві.
, яка напрямлена на читача (звичайно вісь не зображують). Сили , перетинають вісь , тому моменти цих сил відносно осі дорівнюють нулеві.
Знайдемо. Встановлюємо, що зміщення гвинта, яке зумовлене дією сили, спрямоване від читача, а внаслідок того, що вісь, навпаки, спрямована на читача, отримаємо від’ємне значення моменту. Модуль моменту дорівнює добутку сили Р на плече.
Отже
.
Аналогічно знаходимо:
.
Для визначення моменту  розкладемо силу на складові
розкладемо силу на складові  та
та  . Складова перетинає вісь , отже її момент відносно осі дорівнює нулеві. Момент складової (
. Складова перетинає вісь , отже її момент відносно осі дорівнює нулеві. Момент складової ( ) дорівнює:
) дорівнює:
.
Остаточно маємо:
 .
.
Далі знаходимо:  ;
;
 ;
;
 .
.
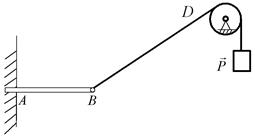
Приклад 3.7. Знайти реакції опори невагомої балки, якщо відома вага вантажа (рис. 3.15, а).
а)
б)
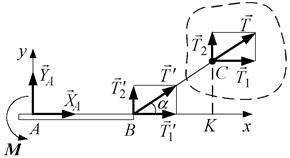
Рис. 3.15
Розв'язання. У жорсткому защемленні в точці мають місце реакції , та момент  . Щоб виключити з розгляду реакції блока, перерізаємо нитку в точці і будемо розглядати рівновагу системи: балка, частина нитки
. Щоб виключити з розгляду реакції блока, перерізаємо нитку в точці і будемо розглядати рівновагу системи: балка, частина нитки  . Звільняємося від в’язей і вводимо реакції в’язей
. Звільняємося від в’язей і вводимо реакції в’язей  ,
,  , , також вводимо натяг нитки
, , також вводимо натяг нитки  (
( ) (рис. 3.15, б). Рівняння рівноваги мають вигляд:
) (рис. 3.15, б). Рівняння рівноваги мають вигляд:
 ;
;
 .
.
Пара сил в ці рівняння не входить, тому що векторна сума сил, що утворюють пару, дорівнює нулеві.
Для запису рівняння моментів, розкладемо силу на складові  та
та  (
(
 ) і знайдемо.
) і знайдемо.
 .
.
Отримаємо
 .
.
Далі знаходимо
 .
.
Отже

 .
.
Бачимо, що момент  не залежить від вибору точки (на відрізку
не залежить від вибору точки (на відрізку  від точки
від точки  до точки
до точки  – дотику нитки до блока). Це і слід було чекати, тому що сила є ковзним вектором, і ми могли перенести силу
– дотику нитки до блока). Це і слід було чекати, тому що сила є ковзним вектором, і ми могли перенести силу  в будь-яку точку на лінії
в будь-яку точку на лінії
її дії, не змінюючи стану системи, що розглядається. Тому доцільно було б нитку перерізати не в точці С, а в точці , (тобто перенести точку С в точку). B (рис. 3.15, б).
Тоді отримаємо:


 .
.
У той же час ці обчислення показують, що при розв’язанні задачі потрібно чітко визначити, де конкретно прикладена кожна з сил, тобто рівновага якої системи розглядається.
Остаточно третє рівняння рівноваги має вигляд:
 .
.
Розв’язуючи отриману систему рівнянь з урахуванням , знаходимо:
 ;
;  ;
;  .
.
Приклад 3.8. Знайти реакції опор невагомої балки  , на яку діють розподілені сили з інтенсивністю q1max =10 Н/м;
, на яку діють розподілені сили з інтенсивністю q1max =10 Н/м;
q 2 = 20 Н/м;  м;
м;  м;
м;  м (рис.3.16, а).
м (рис.3.16, а).
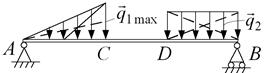
а)
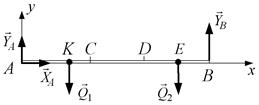
б)
Рис. 3.16