Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Просторова система сил
|
|
Приклад 3.11. До коловорота  під прямим кутом жорстко прикріпленоий стрижень балку
під прямим кутом жорстко прикріпленоий стрижень балку  , до якоїго прикладено розподілене навантаження
, до якоїго прикладено розподілене навантаження  . Коловорот утримується в рівновазі силою
. Коловорот утримується в рівновазі силою  (яка паралельна площині
(яка паралельна площині  ), прикладеною в точці
), прикладеною в точці  під кутом
під кутом  до
до  . Визначити величину сили
. Визначити величину сили  (рис. 3.19, а).
(рис. 3.19, а).
Розв’язання. Розподілене навантаження замінимо зосередженою силою  , яку прикладемо у точці
, яку прикладемо у точці  балки на відстані
балки на відстані 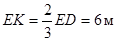 (бо центр ваги трикутника
(бо центр ваги трикутника  , по якому розподілена сила , знаходиться на відстані
, по якому розподілена сила , знаходиться на відстані 
а)
б)
Рис. 3.19
від вершини прямого кута  ). Величина сили визначається площею фігури, по якій вона розподілена (D DEN). Отже,
). Величина сили визначається площею фігури, по якій вона розподілена (D DEN). Отже,

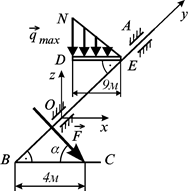
Аналізуємо сили: активні сили і  прикладені до балки та коловорота відповідно; реакції опор (циліндричних підшипників
прикладені до балки та коловорота відповідно; реакції опор (циліндричних підшипників  і
і  ) прикладені до коловорота. Отже, доцільно розглянути рівновагу системи тіл: коловорот і балка, до якої прикладена просторова система сил
) прикладені до коловорота. Отже, доцільно розглянути рівновагу системи тіл: коловорот і балка, до якої прикладена просторова система сил  . Реакції підшипників (рис. 3.19, б) і подамо у вигляді двох складових, перпендикулярних до осі обертання
. Реакції підшипників (рис. 3.19, б) і подамо у вигляді двох складових, перпендикулярних до осі обертання  :
:

 .
.
Маємо 5 невідомих сил: 4 реакції в’язей та сила . Для просторової системи сил можна записати 6 рівнянь рівноваги, тобто задача є статично визначеною.
Шуканою силою є сила , тому доцільно записати лише те рівняння рівноваги, в яке увійдуть відома сила  і невідома сила . Так як лінії дії реакцій підшипників
і невідома сила . Так як лінії дії реакцій підшипників  і
і  перетинають вісь
перетинають вісь  , то момент цих сил відносно цієї осі дорівнює нулеві. Отже, в рівняння моментів сил відносно осі ввійдуть лише сили і .
, то момент цих сил відносно цієї осі дорівнює нулеві. Отже, в рівняння моментів сил відносно осі ввійдуть лише сили і .
Знайдемо момент сили відносно осі . Для цього спочатку знайдемо момент сили відносно якої-небудь точки на осі. Доцільно за таку точку вибрати точку  . Далі знаходимо вектор
. Далі знаходимо вектор  , який спрямований в бік, звідки обертання тіла, яке намагається здійснити сила , видно проти ходу годинникової стрілки, тобто на читача (протилежно напрямку осі ) (рис. 3.20). (Доцільним є також використання “правила гвинта”). Тоді
, який спрямований в бік, звідки обертання тіла, яке намагається здійснити сила , видно проти ходу годинникової стрілки, тобто на читача (протилежно напрямку осі ) (рис. 3.20). (Доцільним є також використання “правила гвинта”). Тоді
Далі знайдемо момент сили відносно цієї ж осі. Так як вектор сили за умовою задачі лежить в площині , то сила і вісь взаємно перпендикулярні і вектор моменту цієї сили доцільно знаходити відносно точки  . Вектор
. Вектор 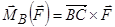 спрямований в бік, звідки обертання тіла, яке намагається здійснити сила , видно за ходомходом годинниковоїюї стрілкииою, тобто вздовж осі (рис. 3.21).
спрямований в бік, звідки обертання тіла, яке намагається здійснити сила , видно за ходомходом годинниковоїюї стрілкииою, тобто вздовж осі (рис. 3.21).
Рис.3.20 Тоді

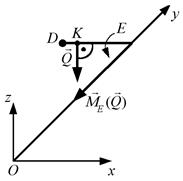 Рис. 3.20
Рис. 3.20
| 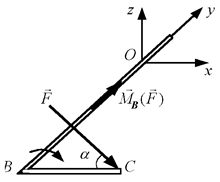 Рис. 3.21
Рис. 3.21
|
Рівняння рівноваги системи сил  і відносно осі запишеться так:
і відносно осі запишеться так:

Звідси знаходимо 
Приклад 3.12. Однорідна трикутна пластина вагою  , яка може
, яка може
обертатися навколо осі  , утримується в рівновазі ниткою
, утримується в рівновазі ниткою  , кут між
, кут між
якою та площиною пластини дорівнює . Нитка, яка прикріплена до пластини в точці пластини в точці D (AD = DO), перекинута через блок і перекинута через блок  іутримує вантаж
іутримує вантаж
вагою  . Визначити реакції сферичного
. Визначити реакції сферичного
шарніра О та петліцилін-дричної петлі , якщо ОА = 5 см; ОВ = 3 см; АВ = 4 см (рис. 3.22, а).
Розв’язання. Оскільки за умовою задачі пластина однорідна, силу  прикладемо в
прикладемо в
центрі ваги пластини (рис. 3.22, б). Переріжемо нитку в точці та введемо натяг нитки  . Щоб виключити з розгляду реакцію блока , переріжемо нитку, яка
. Щоб виключити з розгляду реакцію блока , переріжемо нитку, яка
утримує вантаж, у точці  та введемо натяг нитки
та введемо натяг нитки  . Зауважимо, що
. Зауважимо, що
вектор натягу нитки слід напрямляти від тіла, рівновага якого розглядається. У даному випадку таким тілом є
пластина – саме до неї прикладені шукані реакції опор: реакція сферичного шарніра О та циліндричної петлі B. Реакція сферичного шарніра О дорівнює:
 ,
,
а циліндричної петлі B:
 .
.
Пояснимо відсутність складової  Річ у тім, що петля також обмежує рух пластини в напрямі осі , тобто реакція
Річ у тім, що петля також обмежує рух пластини в напрямі осі , тобто реакція  може мати місце. Але методами теоретичної механіки розділити реакції
може мати місце. Але методами теоретичної механіки розділити реакції  та
та  не можна (в усі рівняння рівноваги входить їх сума). Тому в задачах у таких випадках зображується тільки одна з них (звичайно — це реакція в сферичному шарнірі). Саме це й зроблено.
не можна (в усі рівняння рівноваги входить їх сума). Тому в задачах у таких випадках зображується тільки одна з них (звичайно — це реакція в сферичному шарнірі). Саме це й зроблено.
Таким чином, невідомими є 6 складових реакцій в’язей: 
 . Задача статично визначена.
. Задача статично визначена.
Для полегшення запису рівнянь рівноваги розкладемо силу  , що лежить у площині прямокутного трикутника
, що лежить у площині прямокутного трикутника  , на складові:
, на складові:
| а) | 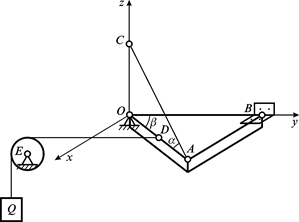
|
| б) | 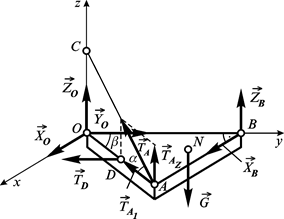
|
Рис. 3.22
 ;
; 
Далі записуємо рівняння рівноваги.
Перші три рівняння – це проекції головного вектора сил на координатні осі:
 (3.1)
(3.1)
 (3.2)
(3.2)
 (3.3)
(3.3)
де 
Записуючи рівняння моментів, врахуємо що в них будуть відсутні сили  ,. Тбо їхні лінії дії проходять через початок системи координат
,. Тбо їхні лінії дії проходять через початок системи координат  – точку і, таким чином, перетинають всі три осі. Отже, не створюють моментів відносно жодної з осей.
– точку і, таким чином, перетинають всі три осі. Отже, не створюють моментів відносно жодної з осей.
Записуючи проекції моментів на вісьрівняння моментів відносно осі  , відкидаємо додатково сили, лінії дії яких паралельні осі , або її перетинають – це сили
, відкидаємо додатково сили, лінії дії яких паралельні осі , або її перетинають – це сили  . А для решти сил
. А для решти сил  записуємо:
записуємо:
 . (3.4)
. (3.4)
При визначенні моментів відносно осі відкидаємо силу  (паралельну осі ) та сили
(паралельну осі ) та сили  (перетинають вісь ). Для решти сил
(перетинають вісь ). Для решти сил  і
і  маємо:
маємо:
 . (3.5)
. (3.5)
Аналогічно для осі  відкидаємо сили
відкидаємо сили  (паралельні осі ),
(паралельні осі ),  (перетинає вісь ). Для решти сил
(перетинає вісь ). Для решти сил  маємо:
маємо:
 3.6)
3.6)
Розв’язуємо отриману систему рівнянь. Із рівняння (3.6) знаходимо
 .
.
З рівняння (3.5) знаходимо:
 H.
H.
З рівняння (3.2) знаходимо
 .
.
З рівняння (3.1) знаходимо
 .
.
З рівняння (3.4) знаходимо
 .
.
З рівняння (3.3) знаходимо
 .
.
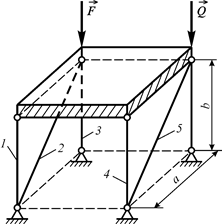
Приклад 3.13. На квадратну пластину вагою  діють сили і , паралельні осі . Пластина утримується в рівновазі шістьма п’ятьма стрижнями. Визначити зусилля в стрижнях (рРис. 3.23, а).
діють сили і , паралельні осі . Пластина утримується в рівновазі шістьма п’ятьма стрижнями. Визначити зусилля в стрижнях (рРис. 3.23, а).
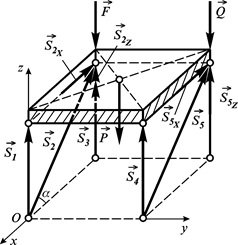
Розв’язання. Будемо розглядати рівновагу пластини. Прикладемо до неї силу ваги  у центрі пластини. Стрижні, які підтримують пластину, відкинемо і замінимо реакціями, спрямованими вздовж них і прикладеними до пластини. Сили
у центрі пластини. Стрижні, які підтримують пластину, відкинемо і замінимо реакціями, спрямованими вздовж них і прикладеними до пластини. Сили  і
і  , що лежать у площинах, паралельних , розкладемо на складові, паралельні осям і :
, що лежать у площинах, паралельних , розкладемо на складові, паралельні осям і :
де  ;
;
де  .
.
а)
б)
Рис. 3.23
Відповідно
 .
.
Запишемо шість рівнянь рівноваги для просторової задачі.
 ;
;
 (3.7)
(3.7)
Проекція головного вектора на вісь дорівнює нулеві, так як лінії дії всіх сил лежать у площинах, паралельних .
У рівнянні моментів відносно осі сили  , лінії дії яких перетинають її, і силу
, лінії дії яких перетинають її, і силу  , лінія дії якої паралельна осі , відкидаємо. Для решти сил маємо
, лінія дії якої паралельна осі , відкидаємо. Для решти сил маємо
 (3.8)
(3.8)
У рівнянні моментів відносно осі відсутні сили  , бо їхні лінії дії перетинають цю вісь. Маємо:
, бо їхні лінії дії перетинають цю вісь. Маємо:
 . (3.9)
. (3.9)
У рівнянні моментів відносно осі сили  , лінії дії яких перетинають її, і сили
, лінії дії яких перетинають її, і сили  , лінії дії яких паралельні осі , відкидаємо. Для сили маємо
, лінії дії яких паралельні осі , відкидаємо. Для сили маємо
 . (3.10)
. (3.10)
Розв’язавши систему рівнянь (3.7¸ 3.10), отримаємо: маємо:

 ;
;  .
.
Тобто,
 ;
;  ; ;
; ;
;  .
.