Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Расчет мощности двигателя и выбор редуктора
|
|
Для предварительного выбора двигателя определяем сопротивление передвижению загруженного крана:
 (3.2)
(3.2)
где:  - среднее ускорение тележки при пуске,
- среднее ускорение тележки при пуске,  [2, таблица 29],
[2, таблица 29],

Мощность предварительно выбираемого двигателя с учетом динамических нагрузок, должна быть определена по формуле:
 (3.3)
(3.3)
где:  - скорость передвижения крана,
- скорость передвижения крана, 
 - средняя кратность пускового момента, =1, 7,
- средняя кратность пускового момента, =1, 7,
Мощность одного двигателя раздельного привода составляет:
 (3.4)
(3.4)

По каталогу [2, приложение34] предварительно принимаем электродвигатель с фазовым ротором типа МТ 211-6 мощностью N = 6, 3 кВт (при ПВ 40%), n = 950 об/мин,
 Jp= 0, 11478
Jp= 0, 11478  ,
, 
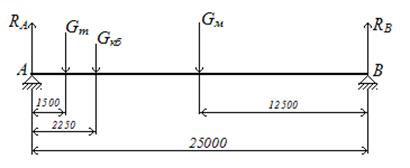
Рисунок 3.3 – Схема к расчету нагрузок на ходовые колеса моста
Наиболее неблагоприятный случай разгона незагруженного крана будет тогда, когда тележка находится в крайнем положении моста со стороны кабины (опора А). При таком положении тележки менее загруженными являются ходовые колеса левой опоры В (рисунок 3.3).
При пуске приводов не должно происходить пробуксовки приводных колес опоры B по рельсам.
Нагрузки на ходовые колеса опор А и В:

где:  - вес моста,
- вес моста, 
 - вес кабины с электрооборудованием,
- вес кабины с электрооборудованием, 
 - вес тележки,
- вес тележки,  =5000 кг,
=5000 кг,









Окончательно выбираем электродвигатель по пусковому моменту привода механизма передвижения опоры В:
 (3.5)
(3.5)
Чтобы получить численное значение  , следует предварительно выбрать не только двигатель, но и редуктор механизма передвижения крана. Определяем число оборотов колеса:
, следует предварительно выбрать не только двигатель, но и редуктор механизма передвижения крана. Определяем число оборотов колеса:

Находим передаточное число редуктора:
По каталогу [2, приложение39] принимаем редуктор типа Ц2-300-32, 42-1Ц и Ц2-300-32, 42-5Ц (рисунок 2.3) (с передаточным числом  ).
).
Фактическое число оборотов колеса:
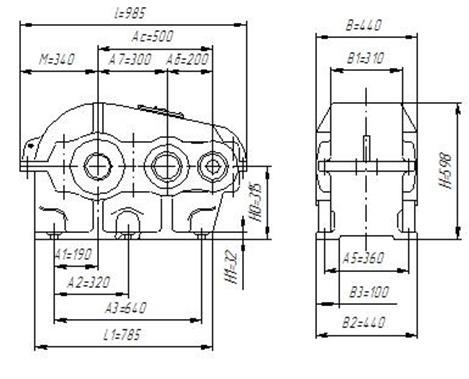
Рисунок 3.4 – Редуктор Ц2-300-32, 42-1Ц(5Ц)
Фактическая скорость передвижения крана с номинальным грузом:

Минимальное время пуска привода опоры В:
 (3.6)
(3.6)
где:  - максимально допустимое ускорение незагруженного крана,
- максимально допустимое ускорение незагруженного крана,
Для обеспечения запаса сцепления  при пуске незагруженном кране ускорение его должно быть не более значения, вычисленного по формуле:
при пуске незагруженном кране ускорение его должно быть не более значения, вычисленного по формуле:
 (3.7)
(3.7)
где:  - число приводных колес,
- число приводных колес, 
 - общее число колес моста, = 4,
- общее число колес моста, = 4,
 - коэффициент сцепления ведущего колеса с рельсом, =0, 2,
- коэффициент сцепления ведущего колеса с рельсом, =0, 2,

Между двигателем и редуктором устанавливаем зубчатую муфту с тормозным шкивом Dт= 200 мм, [2, приложение44] имеющую следующую характеристику: наибольший передаваемый крутящий момент  , момент инерции
, момент инерции 
Приведенный к валу двигателя момент инерции масс, приходящихся на опору В, при незагруженном кране:
 , (3.8)
, (3.8)
где:  - момент инерции ротора двигателя и муфты,
- момент инерции ротора двигателя и муфты,

 - масса действующая в точке В,
- масса действующая в точке В,
 - КПД механизма передвижения тележки, =0, 81,
- КПД механизма передвижения тележки, =0, 81,

Приведенный к валу двигателя момент инерции масс, приходящихся на опору А:
 - масса действующая в точке А,
- масса действующая в точке А,






Статический момент сопротивления передвижению:
 (3.9)
(3.9)
Приведенный к валу двигателя, определяем для привода опоры В при н 
Следовательно:

Приведенный к валу двигателя, определяем для привода опоры А при незагруженном кране:




Исходя из пускового момента мощность двигателя равна:

Средний пусковой момент двигателя МТ 211-6:
 (3.10)
(3.10)

Фактическое время пуска привода опоры В:
 (3.11)
(3.11)
Фактическое время пуска привода опоры А:


Фактический запас сцепления приводных колес с рельсами:
 (3.12)
(3.12)
 > 1, 2.
> 1, 2.
Фактическое ускорение привода незагруженной опоры В:
 (3.13)
(3.13)
езагруженном кране

Фактическое ускорение привода опоры А:
Так как опора А наиболее загружена, то во время разгона привода опоры А будет больше времени разгона привода опоры В.
Результаты расчетов сведены в таблицу 3.1.
Таблица 3.1
Результаты расчета механизма передвижения крана с раздельными приводами
| № | Показатели расчета | Опоры передви-жения | Поднимаемый груз | Незагру-женный кран | ||
| Q | 0, 75Q | 0, 195Q | ||||
| 1 | Вес груза, кг | |||||
| 2 | Сопротивление передвижению крана при установившемся режиме Wст, Н | А | 2819, 30 | 2253, 35 | 1908, 13 | 1687, 41 |
| В | 1274, 79 | 1238, 66 | 1216, 63 | 1202, 53 | ||
| 3 | Нагрузки на опоры, Н | А | 344527, 2 | 275366, 7 | 233178, 8 | 206206, 2 |
| В | 155782, 8 | 151368, 3 | 148675, 5 | 146953, 8 | ||
| 4 | Статический момент сопротивления при передвижении крана, приведенный к валу двигателя, Мст, Н.м | А | 38, 11 | 30, 46 | 25, 795 | 22, 81 |
| В | 16, 26 | |||||
| 5 | Приведенный момент инерции масс к валу двигателя, кг.м2 | А | 5, 40736 | 4, 36349 | 3, 72682 | 3, 31970 |
| В | 2, 42606 | |||||
| 6 | Время пуска, tп, с | А | 5, 87 | 4, 74 | 4, 05 | 3, 61 |
| В | 2, 64 | |||||
| 7 | Ускорение крана при пуске, ап, м/с2 | А | 0, 1857 | 0, 231 | 0, 269 | 0, 302 |
| В | 0, 413 |
Расчеты показывают, что при разной нагрузке ходовых колес опор А и В двигатели нагружаются неодинаково и разгоняются с различными ускорениями, что приводит к созданию дополнительных сил трения реборд колес о рельсы.