Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез дискретного корректирующего устройства частотным методом
|
|
В случае, когда с помощью приближенного способа синтез дискретного корректирующего устройства удается получить требуемое качество переходной характеристики замкнутой системы только при малом значении периода дискретности  с, можно провести синтез дискретной коррекции с помощью логарифмических частотных характеристик.
с, можно провести синтез дискретной коррекции с помощью логарифмических частотных характеристик.
Последовательность синтеза дискретной коррекции следующая [9, с. 66-70].
1. По передаточной функции нескорректированной разомкнутой системы
с учетом передаточной функции фиксатора нулевого порядка  строится ее дискретная передаточная функция по формуле:
строится ее дискретная передаточная функция по формуле:
 .
.
2. С помощью подстановки  находятся передаточные функции
находятся передаточные функции  ,
,  , где
, где  ,
,  – псевдочастота. При
– псевдочастота. При  билинейное преобразование
билинейное преобразование
 .
.
осуществляет конформное отображение замкнутой области устойчивости корней  комплексной плоскости
комплексной плоскости  в левую полуплоскость
в левую полуплоскость  вспомогательной комплексной переменной
вспомогательной комплексной переменной  (рис. 35) или переменной
(рис. 35) или переменной 
Рис. 35
Действительно, учитывая, что любому корню  соответствует единственный корень
соответствует единственный корень  , при
, при  будет выполняться неравенство
будет выполняться неравенство
 .
.
С другой стороны, поскольку  , с учетом равенства
, с учетом равенства  при
при  получим
получим
 ,
,
где псевдочастота  изменяется на интервале
изменяется на интервале  при изменении
при изменении  . При малых значениях
. При малых значениях  псевдочастота
псевдочастота  , т.к.
, т.к.  .
.
Отсюда следует, что единичная окружность отображается в мнимую ось комплексной - плоскости.
Для найденной передаточной функции  разомкнутой системы можно применить критерий устойчивости Найквиста для непрерывных систем.
разомкнутой системы можно применить критерий устойчивости Найквиста для непрерывных систем.
3. Проводится факторизация: передаточной функции :
 ,
,
где символы " +" и " –" обозначают полиномы, корни которых удовлетворяют и не удовлетворяют требуемым показателям соответственно.
Формируется структура желаемой передаточной функции
 .
.
Таким образом, желаемая передаточная должна содержать полиномы  ,
,  передаточной функции
передаточной функции  .
.
4. По передаточной функции строятся асимптотическая ЛАХ и ЛФХ в логарифмическом масштабе  , также как ранее для непрерывных систем.
, также как ранее для непрерывных систем.
5. С учетом свободы выбора полиномов  строится асимптотическая желаемая ЛАХ
строится асимптотическая желаемая ЛАХ  по заданным показателям качества
по заданным показателям качества  ,
,  , которая изображается на графике ЛАХ нескорректированной системы
, которая изображается на графике ЛАХ нескорректированной системы  . При этом следует учитывать, что является неминимально-фазовой и при построении необходимо обеспечивать требуемые запасы устойчивости по амплитуде и фазе, как ранее для непрерывных минимально-фазовых систем.
. При этом следует учитывать, что является неминимально-фазовой и при построении необходимо обеспечивать требуемые запасы устойчивости по амплитуде и фазе, как ранее для непрерывных минимально-фазовых систем.
6. Определяется передаточная функция последовательной дискретной коррекции по ее логарифмической характеристике
 ,
,
или с помощью выражения
 .
.
Выражение передаточной функции дикретной коррекции  определяется в результате обратного преобразования
определяется в результате обратного преобразования  .
.
7. По найденной передаточной функции  дискретной коррекции составляется алгоритм вычисления управляющего сигнала. Для этого передаточная функция записывается в виде:
дискретной коррекции составляется алгоритм вычисления управляющего сигнала. Для этого передаточная функция записывается в виде:
 .
.
Данной передаточной функции соответствует операторное уравнение для дискретной коррекции
 ,
,
которому соответствует разностное уравнение

при нулевых начальных условиях:
 ;
;  .
.
Для устойчивой работы алгоритма вычисления  необходимо, чтобы полюса передаточной функции
необходимо, чтобы полюса передаточной функции  , т.е. корни уравнения
, т.е. корни уравнения  , лежали внутри единичной окружности комплексной плоскости. При этом ошибки вычисления накапливаться не будут.
, лежали внутри единичной окружности комплексной плоскости. При этом ошибки вычисления накапливаться не будут.
Таким образом, алгоритм вычисления управляющего сигнала является рекуррентным и легко реализуется. При этом точность реализации закона управления зависит от числа разрядов АЦП, ЦАП и управляющей ЦВМ. Обычно число разрядов АЦП соответствует числу разрядов управляющей ЦВМ и превышает число разрядов ЦАП. Кроме того, время преобразования сигналов в АЦП, ЦАП и вычисления управляющего сигнала, связанного с выполнением  умножений и
умножений и  сложений (вычитаний), приводит к запаздыванию управления на время
сложений (вычитаний), приводит к запаздыванию управления на время  , которое не должно превышать период дискретности
, которое не должно превышать период дискретности  .
.
Влияние запаздывания на качество переходных процессов замкнутой системы можно оценить с помощью моделирования системы. При необходимости следует заново провести синтез коррекции с учетом запаздывания , принимая в качестве передаточной функции нескорректированной разомкнутой системы  передаточную функцию
передаточную функцию
 .
.
Для рассмотренного выше примера при  с проведем синтез дискретной коррекции частотным методом с помощью программы составленной в Script-файле:
с проведем синтез дискретной коррекции частотным методом с помощью программы составленной в Script-файле:
% Передаточная функция нескорректированной разомкнутой системы
Wpas=75.5*tf([0.4 1], [0.04 1])*tf([1], [0.2 1])*...
tf([1], [0.96 1])*tf([1], [0.38 1]);
% Дискретная передаточная функция нескорректированной разомкнутой системы
T0=0.06, Wpasd=c2d(Wpas, T0);
% ЛАХ и ЛФХ нескорректированной дискретной системы в псевдочастоте
[nWpasd, dWpasd]=tfdata(Wpasd, 'v');
NWpasd=poly2sym(nWpasd, 'z'); DWpasd=poly2sym(dWpasd, 'z');
s=sym('s'); z=(1+s*T0/2)/(1-s*T0/2);
Ns=compose(NWpasd, z); Ds=compose(DWpasd, z);
Ws=Ns/Ds; Ws=simple((Ws)); [nWs, dWs]=numden(Ws);
nWs=sym2poly(expand(nWs)); dWs=sym2poly(expand(dWs));
Wpass=tf(nWs, dWs); zpk(Wpass)
% Асимптотическая ЛАХ нескорректированной системы в псевдочастоте
omega=[0.1 1.041 2.495 2.626 4.963 21.17 33.33 46.17 79.54 1000];
L1=20*log10(75.5); L2=20*log10(75.5); L3=L2-20*log10(2.495/1.041);
L4=L3; L5=L4-20*log10(4.963/2.626); L6=L5-40*log10(21.17/4.963);
L7=L6-60*log10(33.33/21.17); L8=L7-40*log10(46.17/33.33);
L9=L8-20*log10(79.54/46.17); L10=L9;
L=[L1 L2 L3 L4 L5 L6 L7 L8 L9 L10];
figure(1); semilogx(omega, L); hold on
% Асимптотическая ЛАХ желаемой разомкнутой системы в псевдочастоте
omega=[0.1 0.6 3 46.17 79.54 1000];
L1=20*log10(75.5); L2=20*log10(75.5); L3=L2-40*log10(4/0.7);
L4=L3-20*log10(46.17/4); L5=L4-20*log10(79.54/46.17); L6=L5;
L=[L1 L2 L3 L4 L5 L6];
semilogx(omega, L, 'r'); grid on % красный цвет
% Точные ЛАХ и ЛФХ, запасы устойчивости желаемой системы в псевдочастоте
Wgs=75.5*tf([1/3 1], [1/0.6 1])*tf([1/46.17 1], [1/0.6 1])...
*tf([1/33.33 -1], [1/33.33 1])*tf([1/79.54 -1], [1/79.54 1]); zpk(Wgs)
figure(2); margin(Wgs);
% Последовательная коррекция в псевдочастоте
Wks=Wgs/Wpass; Wks=minreal(Wks, 1e-2);
% Обратный переход от псевдочастоты к z-изображению
[nWks, dWks]=tfdata(Wks, 'v');
NWks=poly2sym(nWks, 's'); DWks=poly2sym(dWks, 's');
z=sym('z'); s=2/T0*(z-1)/(z+1);
Ns=compose(NWks, s); Ds=compose(DWks, s);
Ws=Ns/Ds; Ws=simple((Ws)); [nWs, dWs]=numden(Ws);
nWs=sym2poly(expand(nWs)); dWs=sym2poly(expand(dWs));
% Дискретная коррекция в z-изображении
Wkd=tf(nWs, dWs, T0); zpk(Wkd)
sim('DiskrKor'); figure(3); hold on; simplot(y)
В результате выполнения программы определяются передаточные функции ,  , дискретной системы, которые соответственно выводятся на печать:
, дискретной системы, которые соответственно выводятся на печать:
Zero/pole/gain:
0.071012 (s-79.54) (s-33.33) (s+46.17) (s+2.495)
------------------------------------------------
(s+21.17) (s+4.963) (s+2.626) (s+1.041)
Zero/pole/gain:
0.19623 (s-79.54) (s-33.33) (s+46.17) (s+3)
-------------------------------------------
(s+79.54) (s+33.33) (s+0.6)^2
Zero/pole/gain:
0.8345 (z-0.9394) (z-0.8539) (z-0.8349) (z-0.7408) (z-0.2231)
-------------------------------------------------------------
(z-0.9646)^2 (z-0.8607) (z+0.4094) (z-5e-005)
Sampling time: 0.06
Задание желаемой передаточной функции разомкнутой системы в псевдочастоте проводится с учетом  .
.
В результате выполнения программы также выводятся на печать: асимптотические ЛАХ нескорректированной и желаемой разомкнутой системы в псевдочастоте (рис. 36); точные значения ЛАХ и ЛФХ желаемой разомкнутой системы (рис. 37) с указанием запасов по амплитуде (8, 26 дБ) и фазе (45, 5 рад/с); переходная характеристика замкнутой системы (рис. 38) с показателями качества  с,
с,  %.
%.
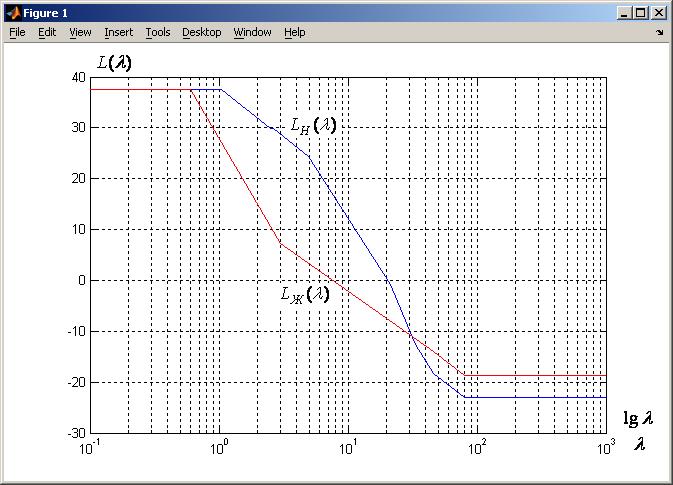
Рис. 36
С учетом малости полюса  , вызванного ошибками вычислений, передаточную функцию
, вызванного ошибками вычислений, передаточную функцию  можно записать в виде
можно записать в виде
 .
.
При этом переходная характеристика замкнутой системы практически не изменяется. Здесь полюса передаточной функции лежат внутри единичной окружности комплексной плоскости, следовательно, алгоритм вычисления управляющего сигнала  будет работать устойчиво, т.е. ошибки вычисления накапливаться не будут.
будет работать устойчиво, т.е. ошибки вычисления накапливаться не будут.
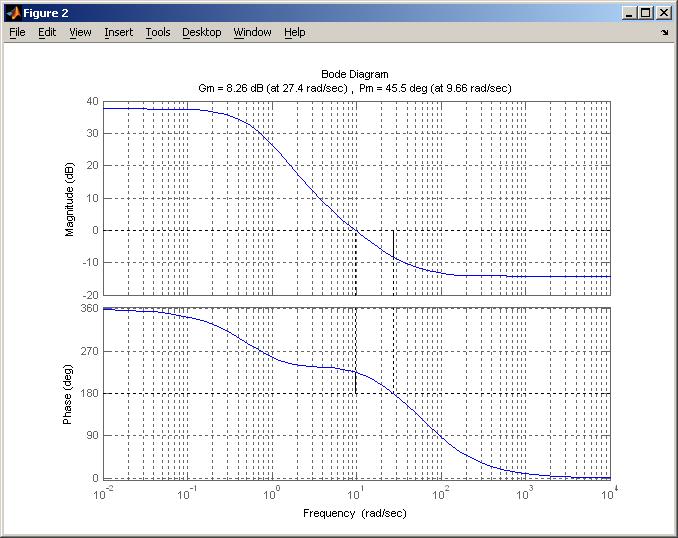
Рис. 37
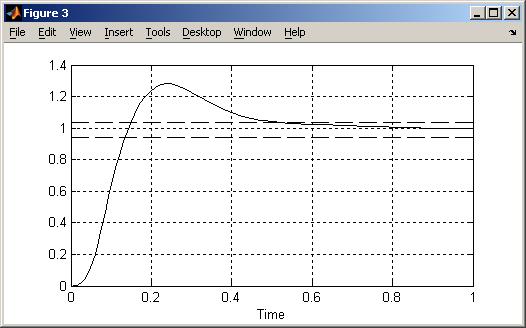
Рис. 38
Для вычисления управляющего сигнала при  требуется 10 умножений и 8 сложений (вычитаний). Если согласно [27] принять, что время выполнения операций умножения и сложения соизмеримы и составляет примерно 3мкс, то общее время вычисления составит 54 мкс.
требуется 10 умножений и 8 сложений (вычитаний). Если согласно [27] принять, что время выполнения операций умножения и сложения соизмеримы и составляет примерно 3мкс, то общее время вычисления составит 54 мкс.
Оценим влияние запаздывания управляющего сигнала , например, при  мкс = 0, 001с. Для этого воспользуемся Script-файлом:
мкс = 0, 001с. Для этого воспользуемся Script-файлом:
Wpas=75.5*tf([0.4 1], [0.04 1])*tf([1], [0.2 1])*...
tf([1], [0.96 1])*tf([1], [0.38 1], 'td', 0.001)
Wkd=tf(nWs, dWs, T0); zpk(Wkd)
sim('DiskrKor'); figure(3); hold on; simplot(y)
который запускается на выполнение после выполнения предыдущего Script-файла. В результате строится переходная характеристика замкнутой системы с показателями качества  с,
с,  %.
%.