Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез последовательной коррекции с помощью ЛАХ и ЛФХ
|
|
Синтез последовательной коррекции с передаточной функцией  проводится по заданной передаточной функции разомкнутой нескорректированной системы
проводится по заданной передаточной функции разомкнутой нескорректированной системы

с выбранным коэффициентом усиления электронного усилителя, и желаемой передаточной функции разомкнутой системы
 .
.
При этом требуемая передаточная функция последовательной коррекции определяется по формуле  .
.
При использовании логарифмических частотных характеристик по ЛАХ  и
и  находится ЛАХ последовательной коррекции
находится ЛАХ последовательной коррекции  , по которой восстанавливается передаточная функция .
, по которой восстанавливается передаточная функция .
Выбор желаемой передаточной функции  или построение осуществляется в соответствии с заданными показателями качества
или построение осуществляется в соответствии с заданными показателями качества  ,
,  переходной характеристики замкнутой системы
переходной характеристики замкнутой системы
 ,
,
или заданными корнями характеристического уравнения
 .
.
Наряду с указанным требованием замкнутая система должна быть работоспособной при любых начальных условиях. Для определения дополнительных требований к выбору запишем передаточную функцию замкнутой системы по ошибке:
 .
.
С учетом выражений  , получим передаточную функцию корректирующего устройства
, получим передаточную функцию корректирующего устройства
 ,
,
в которой сокращаются одинаковые множители в числителе и заменателе. При этом у передаточной функции разомкнутой системы  не допускается сокращения одинаковых множителей числителя и знаменателя передаточных функций
не допускается сокращения одинаковых множителей числителя и знаменателя передаточных функций  ,
,  поскольку они относятся к разным физическим устройствам, и их сокращение равносильно снижению действительного общего порядка уравнения разомкнутой системы.
поскольку они относятся к разным физическим устройствам, и их сокращение равносильно снижению действительного общего порядка уравнения разомкнутой системы.
Предположим, что нет сокращений в передаточной функции корректирующего устройства . Тогда после подстановки получим выражение
 ,
,
из которого следует уравнение для ошибки  :
:
 ,
,
где  ,
,  ,
,  .
.
Отсюда следует, что характеристическое уравнение замкнутой системы

содержит не только корни желаемого характеристического полинома  , но и корни полинома
, но и корни полинома  , которые могут располагаться в близи границы устойчивости (для минимально-фазовых систем) или даже быть неустойчивыми (для неминимально-фазовых систем).
, которые могут располагаться в близи границы устойчивости (для минимально-фазовых систем) или даже быть неустойчивыми (для неминимально-фазовых систем).
В то же время реакция системы  на типовое входное воздействие
на типовое входное воздействие  при нулевых начальных условиях не зависит от корней полиномов , поскольку для изображения Лапласа
при нулевых начальных условиях не зависит от корней полиномов , поскольку для изображения Лапласа  допускается сокращение одинаковых множителей в числителе и знаменателе передаточной функции, что может создать обманчивую картину выполнения требуемого качества.
допускается сокращение одинаковых множителей в числителе и знаменателе передаточной функции, что может создать обманчивую картину выполнения требуемого качества.
Для устранения отмеченного недостатка проведем факторизацию числителя и знаменателя передаточных функций и , т.е. представим их в виде
 ,
,  ,
,
где символы " +" и " –" обозначают полиномы, корни которых удовлетворяют и не удовлетворяют требуемым запасам устойчивости соответственно. Тем самым передаточная функция  задается не произвольно, а с учетом полиномов
задается не произвольно, а с учетом полиномов  ,
,  передаточной функции . В этом случае получим
передаточной функции . В этом случае получим
 .
.
Тогда с учетом передаточной функции разомкнутой системы

найдем передаточную функцию замкнутой системы по ошибке

с характеристическим уравнением
 .
.
Поскольку корни полиномов  ,
,  являются допустимыми, полиномы
являются допустимыми, полиномы  ,
,  выбираются так, чтобы корни полинома
выбираются так, чтобы корни полинома  удовлетворяли требуемым показателям качества.
удовлетворяли требуемым показателям качества.
Таким образом, при построении  необходимо включать в нее сопрягающие частоты, постоянные времени которых соответствуют корням полиномов
необходимо включать в нее сопрягающие частоты, постоянные времени которых соответствуют корням полиномов  ,
,  в разложении передаточной функции на множители.
в разложении передаточной функции на множители.
Процедура синтеза корректирующего устройства состоит из следующих этапов.
1. По заданным значениям показателей качества переходного процесса  , ручным или машинным способом строится желаемая ЛАХ , которая изображается на графике ЛАХ нескорректированной системы
, ручным или машинным способом строится желаемая ЛАХ , которая изображается на графике ЛАХ нескорректированной системы  , построенной по передаточной функции разомкнутой САУ с выбранным коэффициентом усиления (рис. 18).
, построенной по передаточной функции разомкнутой САУ с выбранным коэффициентом усиления (рис. 18).
С методикой построения желаемой ЛАХ можно ознакомиться в [4, с.159-162], из которой следуют следующие рекомендации ее построения по шагам.
а) Построение ЛАХ в области средних частот:
· Определяется желаемая частота среза  по заданным значениям показателей качества переходного процесса , с помощью изображенных на рис. 21 номограмм
по заданным значениям показателей качества переходного процесса , с помощью изображенных на рис. 21 номограмм  , и
, и  , где
, где  выполняет роль вспомогательного параметра (
выполняет роль вспомогательного параметра ( и
и  – максимальное и начальное значение вещественной частотной характеристики замкнутой системы [14, с.496]). Здесь по желаемому перерегулированию , % по стрелке находим аргумент и соответствующее ему произведение
– максимальное и начальное значение вещественной частотной характеристики замкнутой системы [14, с.496]). Здесь по желаемому перерегулированию , % по стрелке находим аргумент и соответствующее ему произведение  . Отсюда по заданному значению находим
. Отсюда по заданному значению находим  .
.
· По дополнительным номограммам  и
и  оцениваются запас устойчивости по фазе
оцениваются запас устойчивости по фазе  и минимальные положительные значения краевых амплитуд
и минимальные положительные значения краевых амплитуд  ,
,  , по которым определяются границы среднечастотного диапазона.
, по которым определяются границы среднечастотного диапазона.
· Через точку проводится отрезок ЛАХ с наклоном  дБ/дек, у которого слева от значение
дБ/дек, у которого слева от значение  , а справа
, а справа  . Тем самым определяется среднечастотный диапазон
. Тем самым определяется среднечастотный диапазон  желаемой ЛАХ, где
желаемой ЛАХ, где
 ,
,  ,
,
или
 ,
,  .
.
· Для обеспечения достаточного запаса устойчивости ширина среднечастотного диапазона должна быть не менее декады, а частота среза располагаться примерно в его середине. Дальнейшее построение желаемой ЛАХ в области низких и высоких частот должно проводится таким образом, чтобы для реальных запасов устойчивости по амплитуде  и фазе
и фазе  выполнялись условия
выполнялись условия  ,
,  ,
,  , которые обеспечивают заданные показатели качества , .
, которые обеспечивают заданные показатели качества , .

Рис. 21
б) Построение ЛАХ в области низких частот:
Сопрягается среднечастотный участок с низкочастотным участком  нескорректированной системы с помощью сопрягающей части, т.е. отрезка прямой в интервале частот
нескорректированной системы с помощью сопрягающей части, т.е. отрезка прямой в интервале частот  при
при  , наклон которого не должен отличаться от наклона в этой области частот более, чем на
, наклон которого не должен отличаться от наклона в этой области частот более, чем на  20 или 40 дБ/дек. Сопряжение горизонтальным участком длиной более половины декады нежелательно, т.к. оно затягивает переходной процесс. Иногда для сопряжения используется более чем один отрезок, что усложняет схему корректирующего устройства.
20 или 40 дБ/дек. Сопряжение горизонтальным участком длиной более половины декады нежелательно, т.к. оно затягивает переходной процесс. Иногда для сопряжения используется более чем один отрезок, что усложняет схему корректирующего устройства.
Значение  не должно быть меньше значения сопрягающих частот характеристики , постоянные времени которых соответствуют корням полиномов , в разложении передаточной функции на множители.
не должно быть меньше значения сопрягающих частот характеристики , постоянные времени которых соответствуют корням полиномов , в разложении передаточной функции на множители.
в) Построение ЛАХ в области высоких частот:
Построение высокочастотного участка проводится из условия получения наиболее простого корректирующего устройства. Для этого необходимо, чтобы вправо от частоты  желаемая ЛАХ имела наклоны равные наклонам или отличные от них, не более чем на 20 или 40 дБ/дек, при этом наклоны последних участков должны быть равны наклонам .
желаемая ЛАХ имела наклоны равные наклонам или отличные от них, не более чем на 20 или 40 дБ/дек, при этом наклоны последних участков должны быть равны наклонам .
2. По виду желаемой ЛАХ восстанавливается передаточная функция , у которой коэффициент усиления разомкнутой системы равен  нескорректированной системы. Последовательность восстановления передаточной функции
нескорректированной системы. Последовательность восстановления передаточной функции  по асимптотической ЛАХ осуществляется в соответствии с методикой построения ЛАХ по ее передаточной функции, приведенной выше.
по асимптотической ЛАХ осуществляется в соответствии с методикой построения ЛАХ по ее передаточной функции, приведенной выше.
3. По передаточной функции строится ЛФХ  и определяются реальные запасы устойчивости по фазе и амплитуде и (см. рис. 17).
и определяются реальные запасы устойчивости по фазе и амплитуде и (см. рис. 17).
4. Если  или
или  , или
, или  , то необходимо повторить процедуру синтеза так, чтобы выполнялись условия , , .
, то необходимо повторить процедуру синтеза так, чтобы выполнялись условия , , .
5. Определяются реальные показатели качества  ,
,  полученной замкнутой системы с передаточной функцией по переходной характеристике
полученной замкнутой системы с передаточной функцией по переходной характеристике
 ,
,
а также время переходного процесса  системы при отработке начальных отклонений и отсутствии входного сигнала.
системы при отработке начальных отклонений и отсутствии входного сигнала.
6. Если  ,
,  , то процесс синтеза закончен; в противном случае необходимо повторить процедуру синтеза так, чтобы увеличить запасы устойчивости и .
, то процесс синтеза закончен; в противном случае необходимо повторить процедуру синтеза так, чтобы увеличить запасы устойчивости и .
7. Передаточная функция последовательной коррекции определяется по ее логарифмической характеристике
 ,
,
построенной на графике функций  , или с помощью выражения
, или с помощью выражения
 .
.
8. По найденной передаточной функции корректирующего устройства составляется его электрическая схема, которая может быть реализована различными способами [14, с.104-118]. Наиболее простым является способ реализации с помощью последовательно соединенных пассивных и активных  - цепей. При этом исходная передаточная функция коррекции разбивается на произведение передаточных функций типовых корректирующих цепей, которые приведены в Приложении А (таблица П.1). Указанное разбиение не является однозначным, поэтому его следует проводить из условия простоты реализации корректирующего устройства. При этом необходимо стремиться к тому, чтобы разница в постоянных времени числителя и знаменателя типовой корректирующей цепи была наименьшей, что снижает влияние шумов в межкаскадных соединениях.
- цепей. При этом исходная передаточная функция коррекции разбивается на произведение передаточных функций типовых корректирующих цепей, которые приведены в Приложении А (таблица П.1). Указанное разбиение не является однозначным, поэтому его следует проводить из условия простоты реализации корректирующего устройства. При этом необходимо стремиться к тому, чтобы разница в постоянных времени числителя и знаменателя типовой корректирующей цепи была наименьшей, что снижает влияние шумов в межкаскадных соединениях.
Для исключения взаимного влияния пассивных корректирующих цепей между ними устанавливаются операционные усилители с требуемым коэффициентом усиления или повторители напряжения.
В качестве примера синтеза последовательного корректирующего устройства рассмотрим нескорректированную разомкнутую систему с передаточной функцией
 ,
,
где  ;
;  ;
;  ;
;  ;
;  ;
;  ; логарифмическая характеристика приведена на рис. 18.
; логарифмическая характеристика приведена на рис. 18.
Учитывая устойчивость корней полиномов числителя и знаменателя  , будем полагать, что
, будем полагать, что  ,
,  .
.
Для заданных показателей качества  %,
%,  с из номограммы рис. 21 по стрелкам находим
с из номограммы рис. 21 по стрелкам находим  и, следовательно,
и, следовательно,  или
или  . При этом минимально допустимые запасы устойчивости
. При этом минимально допустимые запасы устойчивости  дб,
дб,  град; границы среднечастотного диапазона
град; границы среднечастотного диапазона  ,
,  или
или  ,
,  .
.
Полагая  ,
,  рад/с строим асимптотическую желаемую ЛАХ в области низких частот
рад/с строим асимптотическую желаемую ЛАХ в области низких частот  с наклоном –40дб/дек при частоте сопряжения
с наклоном –40дб/дек при частоте сопряжения  рад/с. В области высоких частот вправо от частоты
рад/с. В области высоких частот вправо от частоты  желаемую ЛАХ проводим с наклоном –60дб/дек. В результате построения получим желаемую ЛАХ, которой соответствует передаточная функция
желаемую ЛАХ проводим с наклоном –60дб/дек. В результате построения получим желаемую ЛАХ, которой соответствует передаточная функция
 ,
,
где  ,
,  ,
,  .
.
Для проверки выполнения условий , ,  и , воспользуемся вспомогательной программой, составленной в Script-файле:
и , воспользуемся вспомогательной программой, составленной в Script-файле:
% Нескорректированная разомкнутая система
% Передаточная функция
Wpas=75.5*tf([0.4 1], [0.04 1])*tf([1], [0.2 1])*...
tf([1], [0.96 1])*tf([1], [0.38 1]);
% Сопрягающие частоты
omega=[0.1 1/0.96 1/0.4 1/0.38 1/0.2 1/0.04 1/0.001];
% Асимптотическая ЛАХ
L1=20*log10(75.5); L2=20*log10(75.5); L3=L2-20*log10(0.96/0.4);
L4=L3; L5=L4-20*log10(0.38/0.2); L6=L5-40*log10(0.2/0.04);
L7=L6-60*log10(0.04/0.001); L=[L1 L2 L3 L4 L5 L6 L7];
semilogx(omega, L); hold on
% Желаемая разомкнутая система
% Сопрягающие частоты
omega=[0.1 0.7 3.06 45.31 1000];
% Асимптотическая ЛАХ
L1=20*log10(75.5); L2=20*log10(75.5); L3=L2-40*log10(3.06/0.7);
L4=L3-20*log10(45.31/3.06); L5=L4-60*log10(1000/45.31);
L=[L1 L2 L3 L4 L5];
semilogx(omega, L, 'r'); grid on % красный цвет
% Передаточная функция
Wgpas=75.5*tf([1/3.06 1], [1/0.7 1])*tf([1], [1/0.7 1])...
*tf([1], [1/45.31 1])*tf([1], [1/45.31 1]);
% Точные ЛАХ и ЛФХ, запасы устойчивости
figure; margin(Wgpas); grid on
% Переходная характеристика желаемой замкнутой системы
Wgs=feedback(Wgpas, 1); figure; step(Wgs); grid on
% Передаточная функция корректирующего устройства
Wk=Wgpas/Wpas; zpk(Wk)
% Упрощение корректирующего устройства
% Передаточная функция упрощенного корректирующего устройства
% после сокращения близких нулей и полюсов:
% 2.3985 (s+25) (s+5) (s+3.06)(s+1.042)
% Wk= -------------------------------------
% (s+45.31)^2 (s+0.7)^2
Wk2=zpk([-25, -5, -3.06, -1.042], [-45.31, -45.31, -0.7, -0.7], 2.3985);
% Переходная характеристика желаемой замкнутой системы
Wgpas2=Wpas*Wk2; Wgs2=feedback(Wgpas2, 1); hold on; step(Wgs2, 'r--');
В результате выполнения программы строятся: асимптотические ЛАХ нескорректированной и желаемой системы (рис. 22); точные ЛАХ и ЛФХ желаемой системы (рис. 23) с указанием запасов устойчивости  дб/дек,
дб/дек,  град;
град;
переходная характеристика замкнутой системы (рис. 24), у которой  с,
с,  %; ЛАХ и ЛФХ корректирующего устройства с передаточной функцией
%; ЛАХ и ЛФХ корректирующего устройства с передаточной функцией  (рис. 25).
(рис. 25).
На печать выводится выражение передаточной функции  :
:
> >
Zero/pole/gain:
2.3985 (s+25) (s+5) (s+3.06) (s+2.632) (s+1.042)
------------------------------------------------
(s+45.31)^2 (s+2.5) (s+0.7)^2
Полученную передаточную функцию

можно упростить, поскольку числитель и знаменатель содержат близкие сомножители  и
и  . Вынося за скобки свободные члены в сомножителях, после сокращения получим:
. Вынося за скобки свободные члены в сомножителях, после сокращения получим:
 .
.
Для сравнения на рис. 25 приведены ЛАХ и ЛФХ корректирующего устройства с передаточными функциями  и
и  (пунктирная кривая), которые практически совпадают.
(пунктирная кривая), которые практически совпадают.
Также для сравнения на рис. 24 приведен переходной процесс замкнутой системы с передаточной функцией разомкнутой системы  (пунктирная кривая), который практически не отличается от процесса с передаточной функцией
(пунктирная кривая), который практически не отличается от процесса с передаточной функцией  .
.
Таким образом, синтез корректирующего устройства по заданным показателям качества выполнен за одну итерацию.

Рис. 22

Рис. 23

Рис. 24

Рис. 25
Для анализа свойств замкнутой системы с передаточной функцией коррекции  найдем корни характеристического уравнения замкнутой системы, построим переходной процесс системы при начальных отклонениях и отсутствии входного сигнала с помощью Script-файла:
найдем корни характеристического уравнения замкнутой системы, построим переходной процесс системы при начальных отклонениях и отсутствии входного сигнала с помощью Script-файла:
% Нескорректированная разомкнутая система
% Передаточная функция
Wpas=75.5*tf([0.4 1], [0.04 1])*tf([1], [0.2 1])*...
tf([1], [0.96 1])*tf([1], [0.38 1]);
% Модель разомкнутой системы в пространстве состояний
sys=ss(Wpas);
[a, b, c, d]=ssdata(sys);
% Корректирующее устройство
% Передаточная функция
Wk2=zpk([-25, -5, -3.06, -1.042], [-45.31, -45.31, -0.7, -0.7], 2.3985*2.632/2.5);
% Модель корректирующего устройства в пространстве состояний
sysk=ss(Wk2);
[ak, bk, ck, dk]=ssdata(sysk);
% Модель замкнутой системы
az=[a-b*dk*c b*ck; -bk*c ak]; bz=[b*dk; bk]; cz=[c ck*0]; dz=0;
sysz=ss(az, bz, cz, dz);
eig(az)% определение корней замкнутой системы
% Построение переходного процесса по начальным условиям
initial(sysz, [0 0 0 1 0 0 0 1])
Врезультате выполнения программы вычисляются корни:
-65.1013 -25.0000 -11.7419 +14.4727i -11.7419 -14.4727i -5.0000
-3.5248 -2.5413 -1.0420
и строится переходной процесс по выходу системы, приведенный на рис. 26.
Время переходного процесса можно оценить по формуле  , где
, где  – наименьшее значение модуля вещественной части устойчивых корней характеристического уравнения системы [1]. Для данного случая
– наименьшее значение модуля вещественной части устойчивых корней характеристического уравнения системы [1]. Для данного случая  , что соответствует корню звена знаменателя передаточной функции с постоянной времени . При этом
, что соответствует корню звена знаменателя передаточной функции с постоянной времени . При этом  с соответстует рис. 26, построенного для начальных отклонений в объкте управления и корректирующем устройстве.
с соответстует рис. 26, построенного для начальных отклонений в объкте управления и корректирующем устройстве.
В случае необходимости уменьшения времени  следует принять
следует принять  ,
,  и провести синтез управления заново.
и провести синтез управления заново.
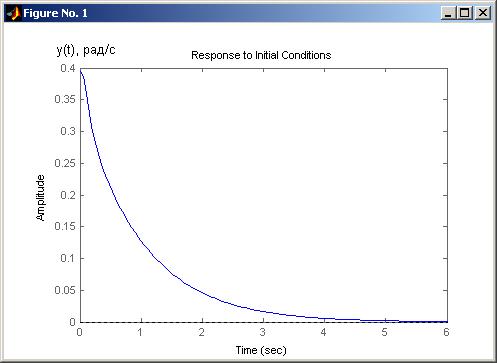
Рис. 26