Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Основные характеристикитранспортного потока
|
|
Расположение транспортных средств. Для движущегося транспортного средства (автомобиля) необходима определенная ширина полосы, существенно большая, чем ширина самого автомобиля. Дело в том, что под воздействием различных факторов - ветер, неровности дороги, смещение центра тяжести, люфт в рулевом управлении и т.д. - автомобиль постепенно отклоняется от заданной траектории. Когда водитель улавливает это отклонение, он легким движением рулевого колеса, часто автоматически, возвращает автомобиль на заданную траекторию, и так все время. В результате автомобиль движется не прямо, а «рыскает» из стороны в сторону и для движения ему необходим т.н. динамический коридор определенной ширины. В грубом приближении ширина динамического коридора, В, определяется по формуле
Ј = 6a+0, 043v + 0, 3, м,
где Ьй - ширина автомобиля, м;
v - скорость движения, м/с;
0, 3 - отрезок безопасности.
Конечно, у современных легковых автомобилей этот коридор намного меньше, чем у старых разбитых грузовиков, но он есть у каждого автомобиля. Оказалось, что для легковых автомобилей при скорости порядка 60 км/ч достаточно ширины полосы 3 м, а для автобусов, троллейбусов и тяжелых грузовиков надо около 3, 5 м. При скорости 100 км/ч желательно иметь ширину полосы не менее 3, 6 м. На поворотах дорог или на кольцевых перекрестках ширина полосы также должна быть увеличена.
При движении по полосе перед каждым автомобилем должно быть свободное пространство, именуемое дистанцией безопасности. Вместе с собственной длиной автомобиля она образует т.н. «динамический габарит» LR> под которым понимают минимальное безопасное расстояние между двумя движущимся автомобилями, замеренное по одноименным задним габаритным точкам. В первом приближении можно записать:
La «7+ v +, м,
11 67ф
где v - скорость движения, м/с;
Ф - коэффициент сцепления колеса с дорогой (см. табл. 6).
Динамический габарит определяется для заднего автомобиля и представляет собой отрезок полосы дороги, который он фактически занимает при движении в транспортном потоке. Оказалось, что в нормальных условиях (ф ~ 0, 5) минимальная дистанция безопасности (в метрах) численно равна примерно половине скорости движения (в км/ч). Например, при скорости 50 км/ч минимальная дистанция должна быть примерно 25 м, а при скорости 70 км/ч -примерно 35 м. При этом, если дорога очень шероховатая, то дистанция может быть немного уменьшена, а если дорога скользкая - то существенно увеличена. Аналогично влияние скорости - при малой скорости дистанция может быть несколько уменьшена, при большой скорости - существенно увеличена. Если говорить о безопасных интервалах, т.е. о времени прохождения дистанции безопасности, то они более стабильны и находятся при нормальных условиях в пределах 1, 8-2 с. При этом, также как и дистанция безопасности, с увеличением скользкости или с ростом скорости интервалы несколько увеличиваются, и наоборот.
Интенсивность движения Q - это количество транспортных средств, прошедших через сечение дороги в единицу времени, в качестве которого чаще всего принимают час (реже секунду, сутки, год). Интенсивность движения - основной параметр транспортного потока,
изменяется в пространстве и во времени. Неравномерность в пространстве проявляется в отличии интенсивности движения на разных дорогах, на разных полосах одной и той же дороги, на разных направлениях движения на перекрестке и т.д. Временная неравномерность тесно связана с характером общественной жизни - ночью она затихает, утром наблюдается всплеск активности (утренний пик), днем стабилизируется, вечером имеет место наибольшая активность (вечерний пик), затем она постепенно затухает (рис. 8).
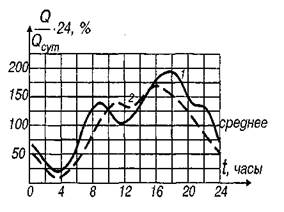
Рис. 8. Распределение интенсивности движения по часам суток [7]: 1 - город; 2 - загород
Подобные изменения можно проследить и в недельном цикле (всплеск в пятницу после обеда и в воскресенье вечером), и в годовом цикле - зимой поменьше, весной всплеск, летом стабилизация (уезжают в отпуск), осенью снова всплеск. Неравномерность интенсивности движения наблюдается и в меньшие периоды - например, в течение часа есть несколько пятиминутных всплесков, а если взять, например, 10 светофорных циклов, то почти каждый из них будет отличаться своей интенсивностью. Замечено, что чем большая интенсивность движения, тем выше ее равномерность. Для того чтобы прикинуть интенсивность движения на той или иной улице или дороге, достаточно подсчитать число автомобилей, прошедших, например, за 5 минут и полученную цифру умножить на 12. Для более точных расчетов время замеров надо увеличивать. Следует отметить, что интенсивность движения в городах больше, чем за городом, а на некоторых городских магистралях она достигает величины 500-900 авт./ч на каждую полосу движения. Трудность управления заключается в том, что в часы пик, когда интенсивность движения увеличивается чуть ли не вдвое, возникают перегрузки (заторы) со всеми вытекающими негативными последствиями.
Состав транспортного потока. В одном потоке движутся сильно отличающиеся по своим характеристикам транспортные средства - от мотоциклов до большегрузных автопоездов. Чтобы учесть все многообразие транспортных средств, их приводят к общему знаменателю - легковому автомобилю. Все транспортные средства группируются в несколько, например 6, типов и для каждого типа выбирается некий средний представитель. Для каждого представителя определяются основные характеристики, которые сопоставляются с одноименными характеристиками представителя легковых автомобилей - результатом этого сопоставления является коэффициент приведения Кп. Приведение производится по трем признакам: габарит - длина занимаемой полосы при движении со скоростью около 60 км/ч (Кпг); динамика - время освобождения стоп-линий после включения зеленого сигнала (Кпн) и экономика - стоимость экономических потерь от задержек, остановок, перепробега и т.д. (Кт). В табл. 7 приведены коэффициенты приведения основных типов транспортных средств. Если, например, в потоке из 100 автомобилей 80 легковых, 15 грузовых, 3 автопоезда и 2 автобуса или троллейбуса, то в экономическом отношении такой поток равноценен 130 легковым (приведенным) автомобилям - Кпэ = 1, 3, а в динамическом отношении - 112 приведенным автомобилям - Кпн = 1, 12.
Таблица 7
Коэффициенты приведения транспортных средств [7]
| Тип ТС | Группа | Индекс | ^пГ | ^пН | ^пЭ |
| Мотоциклы, мопеды, мотороллеры, мокики | Мотоциклы | М | 0, 5 | 0, 7 | 0, 5 |
| Легковые, грузопассажирские, микроавтобусы | Легковые | Л | 1, 0 | 1, 0 | 1, 0 |
| Грузовые, тракторы, с.-х. машины | Грузовые | Г | 2, 0 | 1, 4 | 1, 7 |
| Автопоезда, тракторные поезда | Поезда | п | 3, 5 | 2, 3 | 3, 0 |
| Автобусы, троллейбусы | Общественный | О | 3, 0 | 2, 0 | 8, 0 |
| Сочлененные автобусы, троллейбусы | Сочлененные | с | 4, 0 | 2, 6 | 14, 0 |
Скорость движения - является одной из двух целевых функций дорожного движения (наряду с безопасностью). Различают несколько разновидностей скорости:
- мгновенная - скорость на очень коротком отрезке пути (пространственная) или в
данный короткий промежуток времени (временная). Эта скорость в основном определяет
безопасность движения. Во-первых, от нее зависит управляемость автомобиля (занос, опро
кидывание и т.д.) и время, которым располагает водитель для реагирования на возникшую
опасность. Во-вторых, от нее зависит тяжесть последствий аварии, поскольку сила (энергия)
удара зависит от квадрата скорости - вспомните знаменитую формулу кинетической энер-
mV2
гии: Е---------, где т - масса, V- скорость в момент удара;
- сообщения - средняя скорость с учетом остановок и стоянок - именно она является целевой функцией дорожного движения. Например, расстояние 100 км я проехал (с заправкой и отдыхом) за 2 часа - скорость сообщения равна 50 км/ч;
- крейсерская - скорость, при которой водитель чувствует себя хорошо, комфортно. Эта скорость также определяет безопасность - если водитель чувствует себя некомфортно, он раздражается, выходит из равновесия, устает, засыпает и т.д., в результате чего вероятность ошибки или аварии резко увеличивается.
Есть еще скорость «разрешенная)), «рекомендуемая)), «ограничения)), «максимальная)) и др., смысл которых ясен из их названий. Имеется несколько разновидностей скорости, смысл которых определить довольно сложно. Например, «экономичная скорость)) - что здесь экономится: время, топливо, резина? Или, «безопасная скорость)) - в какой ситуации?: в одних случаях лучше сбавить скорость или даже остановиться, а в других - лучше добавить газу.
Очень большое значение имеет равномерность движения, характеризуемая разбросом (дисперсией) скорости. На рис. 9 показаны два варианта движения на магистральных улицах г. Минска. Жирная линия - это фрагмент записи скорости автомобиля на участке улицы Я. Коласа, включающем 3 светофорных объекта. Видно, что движение очень неравномерное, с интенсивными разгонами до 65 км/ч, торможениями, остановками перед трамваем и у светофоров и, как результат, очень низкая средняя скорость. Тонкая линия - это фрагмент записи скорости автомобиля на участке проспекта Независимости, также включающем 3 светофорных объекта. Видно, что при весьма высокой для города средней скорости движение очень равномерное. Легко представить, какими огромными потерями всех видов сопровождается движение на участке улицы Я. Коласа и каким может (и должно!) быть движение на магистральных улицах города.
Плотность потока - это число автомобилей, приходящихся на 1 км полосы дороги. Плотность находится в пределах от 1 до 100 авт./км и определяет условия движения - чем меньше плотность, тем свободнее движение. Между интенсивностью Q, скоростью V и плотностью р существует зависимость:
Q=V-p< 2000 авт./ч.
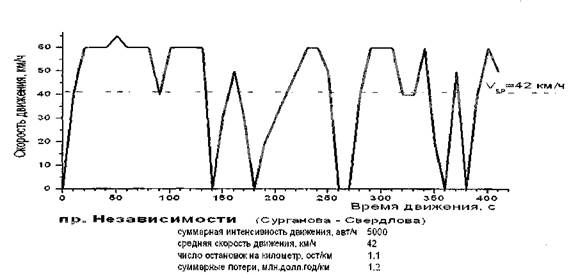
Рис. 9. Скорость движения на магистральных улицах г, Минска (пример)
При этом чем больше плотность, тем меньше скорость. С одной стороны, чем меньше плотность, тем лучше водителям, но тем дороже обходится движение, поскольку дорогостоящая улица или дорога является незагруженной. С другой стороны, если дорогу сильно загрузить, то скорость движения упадет, а неравномерность - возрастет и движение снова обойдется очень дорого. Компромиссное решение в городе находится при плотности порядка 25 авт./км и скорости порядка 50-60 км/ч, а за городом - при плотности порядка 15 авт./км и скорости порядка 85 км/ч. При плотности свыше 45-50 авт./км движение сопровождается частыми остановками и заторами и становится практически неприемлемым. Следует отметить, что плотность потока на дорогах и улицах Республики Беларусь сегодня весьма невысокая и пока не является непосредственной причиной резкого снижения скорости или других потерь.
Состояние транспортного потока. Мы уже знаем, что неравномерность движения -это зло. При этом возможны ситуации, когда весь поток вынужден тормозить, останавливаться, трогаться, разгоняться и т.д. Однако, возможны и такие ситуации, когда поток, в целом, движется относительно равномерно, но внутри его происходит масса ненужных перемещений - опережений, перестроений, обгонов, торможений и т.д. Причинами могут быть как внешние факторы - неровности дороги, запаркованные или левоповоротные автомобили, тихоходные транспортные средства и т.д., так и сами водители - либо лихачи, либо тихоходы-перестраховщики, провоцирующие остальных водителей на ненужные и опасные маневрирования. Еще одна характеристика - внутреннее напряжение в потоке, которое накапливается, например, при длительной невозможности обгона тихоходного транспортного средства -как только появится возможность (или даже полувозможность) обгона, его тут же с большим риском бросаются выполнять сразу несколько водителей.
Американский ученый Дональд Дрю предложил оценивать состояние транспортного потока по т.н. уровням обслуживания (А, В, С, Д E, F), включающим плотность, относительную (по отношению к скорости свободного движения на данной дороге) скорость, интенсивность движения и т.д. [1]. Самым лучшим считается уровень А при плотности до 6 авт./км и практически свободном движении. Самым плохим считается уровень F при плотности свыше 45 авт./км, когда движение сопровождается частыми остановками и заторами. Для загородных условий терпимым является уровень С (плотность до 20 авт./км), для городских условий - уровень D (плотность до 30 авт./км).
Пешеходный поток. В принципе, пешеходный поток похож на транспортный - те же физические закономерности, те же параметры, те же особенности, связанные с психофизиологией человека и его личностью. Однако имеются и существенные отличия, обусловленные разными скоростями движения, массой и габаритами элементарных частиц потока, уровнем подготовки к движению, последствиями столкновений и т.д. Рассмотрим некоторые параметры пешеходного потока. 30
Интенсивность движения - это количество пешеходов, прошедших через поперечное сечение пешеходного пути в единицу времени. Ширина полосы пешеходного движения принята равной от 0, 75 м - в обычных местах, до 1 м - в районе магазинов, вокзалов, рынков. Наибольшая интенсивность движения пешеходов наблюдается на главных и торговых улицах города и в районе пересадочных узлов. Что касается временной неравномерности, то она весьма похожа на транспортную.
Состав потока не играет такой большой роли, как в транспорте, хотя и оказывает определенное влияние на организацию движения. Особое внимание при выборе регулировочных решений следует уделять таким пешеходным потокам, в составе которых находятся дети либо престарелые люди.
Плотность потока - это количество пешеходов, приходящихся на единицу площади пешеходного пути. Часто пользуются обратной величиной - количеством квадратных метров, приходящихся на человека.
В зависимости от плотности потока условия пешеходного движения подразделяются на несколько категорий или уровней обслуживания. Согласно одной из классификаций [5], например, при плотности до 0, 3 чел./м2 движение считается свободным; до 0, 6 чел, /м2 - терпимым; до 1 чел./м2 - плотным; до 1, 5 чел./м2 - очень плотным и свыше 1, 5 чел./м2 - давка. Согласно другой классификации [1], при плотности 0, 3 чел./м2 - уровень обслуживания^; до 0, 4 - В; до 0, 7 - С; до 1, 0 - Д до 2 - Е; свыше 2 - F. Почти все авторы сходятся в том, что нормальные условия движения сохраняются до плотности порядка 0, 5 чел./м2 (или 2 м2/чел.).
Скорость движения пешеходов колеблется в пределах от 3 до 6 км/ч. Конечно, имеются отклонения в обе стороны, например, женщины с маленькими детьми или очень пожилые люди имеют маленькую скорость - до 1 км/ч, а молодежь в возрасте от 20 до 30 лет при быстром шаге развивает скорость до 7, 5 км/ч. Принято считать, что нормальная скорость движения пешеходов по тротуару близка к 4 км/ч (1, 1 м/с), а по переходу - близка к 5 км/ч (1, 3 м/с). При расчете опасности в конфликте транспорт-пешеход принимается во внимание легкий бег пешехода, при котором скорость достигает 11 км/ч (3 м/с).
2.2. Маневрирование
Маневрирование - это изменение скорости и (или) направления движения. Маневры бывают обязательными, например, необходимо повернуть или остановиться, или необязательными, например, многочисленные перестроения, обгоны, опережения, торможения, разгоны и т.д.
При одиночном движении маневрирование представляет опасность из-за возможности заноса, опрокидывания или движения по несанкционированной траектории. При движении в потоке маневрирование, кроме того, почти всегда сопровождается конфликтами с другими участниками движения. Чтобы маневрирование в потоке было безопасным, оно должно быть заранее подготовленным и выполняться четко и уверенно. При этом другие участники движения должны быть своевременно - за 5-6 с, минимум за 3 с - предупреждены о намерении выполнить маневр, с тем, чтобы предотвратить могущие возникнуть конфликтные ситуации.
Маневры всегда сопровождаются потерями. Конечно, необязательное, излишнее маневрирование вредно и при одиночном движении, но с этим еще как-то можно мириться, поскольку масштабы этих потерь относительно невелики и несут их в основном сами же маневрирующие водители и их пассажиры. Однако, необязательное маневрирование целых потоков, в силу масштабов вызываемых потерь, становится общественно значимым злом и поэтому крайне нежелательно.
На рис. 10 приведены условные обозначения основных видов маневров (к сожалению, общепринятых обозначений пока нет).
Маневры условно можно подразделить на простые - при которых разово изменяется только один параметр, например, торможение, разгон, - и сложные, при которых требуется изменение, часто многократное, обоих параметров, например, обгон. Маневры бывают бес-
конфликтные, когда не «мешают» движению других участников, и конфликтные. Они могут выполняться в служебном режиме - ожидаемо, в заранее намеченном месте, спокойно, с плавньми поворотами и умеренными разгоном или торможением с замедлением до 2-3 м/с2, -и в экстренном режиме, неожиданно и на пределе возможностей. При этом возможны случаи, когда маневр, например, обгон, начинается в служебном режиме, а заканчивается - в экстренном (к несчастью, иногда вообще не заканчивается).
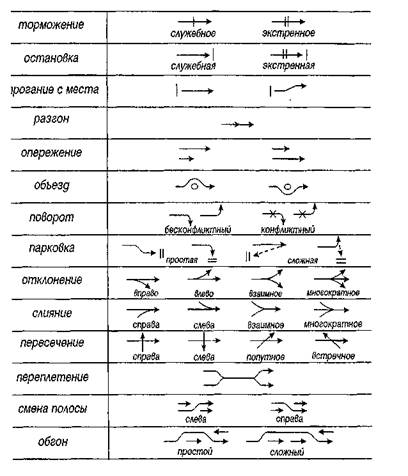
Рис. 10. Обозначения видов маневров
На рис. 11 показана схема и t-S диаграмма (t - время, S - путь) маневра слияния. В поток автомобилей 1-3-4-5 решил влиться водитель автомобиля 2. Увидев достаточно большой интервал между автомобилями 3-4, он посчитал его вполне подходящим (приемлемым) для маневра и начал маневр слияния. Поскольку, однако, он начал маневр с места, разгонялся медленно, а принятый им интервал оказался явно мальм, то возник конфликт и для избежания столкновения водитель автомобиля 4 вынужден тормозить, а водитель автомобиля 5, чтобы сохранить дистанцию безопасности до автомобиля 4, вынужден притормаживать.
Как видно из схемы, в маневрах подобного типа большое значение имеет величина т.н. приемлемого интервала. Установлено, что при маневрировании с хода, когда относительные скорости невелики, например, при смене полосы движения, минимальный приемлемый интервал составляет всего лишь около 3 с. При маневрировании с места, как в нашем примере, минимальный приемлемый интервал уже в два раза больше, т.е. около 6 с. Ясно, что дожидаться такого интервала нужно гораздо дольше, да и опасность такого маневра выше. Заметим, что приведенные значения приемлемых интервалов относятся только к легковым автомобилям - для других видов транспортных средств они больше примерно в Кт раз (см. табл. 7). Например, при смене полосы движения приемлемый интервал для грузовика (Кт - 1, 4) будет примерно равен ТГ = 3'1, 4 = 4, 2 с.
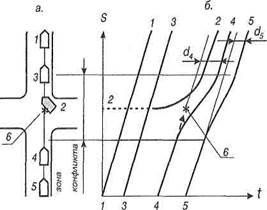
Рис. 11. Маневр слияния [7]:
а - план; б - t-S диаграмма; 1, 3, 4, 5 - транзитные автомобили; 2 - поворотный автомобиль;
1-1...5-5- траектории движения; 6 - возможная точка столкновения; d4, d5 - задержки автомобилей
Таким образом, для выполнения конфликтных маневров слияния, пересечения, смены полосы движения и обгона большое значение имеет правильный выбор приемлемого интервала. Для точной оценки приближающегося интервала между автомобилями необходимо иметь хорошую видимость. Чтобы уменьшить величину приемлемого интервала и сделать маневры более быстрыми и безопасными, кроме хорошей видимости, должна быть ровная и нескользкая дорога, хорошая обзорность и разгонная динамика транспортных средств. Для облегчения маневра слияния на нагруженных или скоростных магистралях делают разгонные полосы, на которых маневрирующий участник разгоняется, выравнивая свою скорость движения со скоростью потока, тем самым уменьшая величину приемлемого интервала и опасность маневра.
Маневр существенно облегчается, если имеется только один главный (которому надо уступить дорогу) конфликтующий участник. Если главных участников два или три, и они одновременно приближаются с разных сторон, то водитель (или пешеход) не успевает отслеживать и оценивать каждого из них и ошибка более вероятна.
Самым опасным маневром, пожалуй, является обгон, при котором скорости обгоняющего и встречного автомобиля складываются, а приемлемые интервалы во встречном потоке чрезвычайно велики (до 35 с или до 1750 м), из-за чего очень трудно оценить расстояние до встречного автомобиля и его скорость. Как известно, это расстояние определяется путем сопоставления размеров силуэта встречного автомобиля в данный момент с некими эталонными размерами, хранящимися в нашей памяти. Если расстояния велики, размеры силуэтов малы, сравнение очень неточное и ошибка вполне вероятна. Тем более что в этот процесс вмешивается цвет машины (чем ярче, тем кажется ближе), состояние погоды, направление на солнце, чистота стекол, самочувствие водителя и т.д. Скорость движения встречного автомобиля водитель определяет по скорости увеличения размеров силуэта этого автомобиля - чем быстрее увеличиваются размеры, тем больше скорость автомобиля. Ясно, что и здесь ошибка вполне возможна. В результате при оценке приемлемого интервала перед началом обгона ошибка более чем вероятна. Дело усложняется неизвестным состоянием дороги и поведением водителя обгоняемого транспортного средства, возможным выездом автомобилей из боковых проездов уже в процессе обгона и т.д. Иными словами, обгон чрезвычайно опасен и не всегда возможен. При интенсивности движения на встречной полосе более 800 авт./ч обгон практически невозможен. Но это еще полбеды, поскольку такая нагрузка довольно редкая и никто и не пытается делать обгоны. Самое страшное происходит при нагрузке на встречную полосу свыше 400 авт./ч, которая встречается довольно часто и при которой обгоны еще возможны, но почти все они очень рискованны.