Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Типовая задача с решением. Найти оптимальную передаточную функцию линейной системы, представляющую собой фильтр с упреждением на время t0
|
|
Найти оптимальную передаточную функцию линейной системы, представляющую собой фильтр с упреждением на время t 0. На вход системы поступают полезный сигнал и помеха, характеризуемые корреляционными функциями  (t)=
(t)=  e -aô tô
e -aô tô  =
=  , соответственно.
, соответственно.
Решение уравнения Винера-Хопфа позволяет получить следующее выражение для оптимальной передаточной функции линейной системы, обеспечивающей минимум дисперсии ошибки на выходе системы (предполагается, что система астатическая, т.е. M [ U ]= 0):
H (p)=  , (3.13)
, (3.13)
где V (t)= X (t) + U (t) – суммарный сигнал на входе линейной системы,
SVV (p)=  – факторизация спектральной плотности суммарного сигнала на входе линейной системы,
– факторизация спектральной плотности суммарного сигнала на входе линейной системы,
Z (t) – желаемый сигнал на выходе линейной системы,
SXZ (p) – взаимная спектральная плотность между случайными процессами на входе X (t) и выходе Z (t) системы.
Обозначим  Ф(p) и представим Ф(р) в виде:
Ф(p) и представим Ф(р) в виде:
Ф(р)=Ф+(р) + Ф-(р), (3.14)
где Ф+(р) и Ф-(р) – составляющие, содержащие левые и правые полюса Ф(р) соответственно. Эти составляющие при условии  могут быть определены с помощью выражений:
могут быть определены с помощью выражений:
Ф+(р) = -  , (3.15)
, (3.15)
Ф-(р) = -  , (3.16)
, (3.16)
где рк+ и рк- - левые и правые полюса Ф(р), соответственно.
В рассматриваемом примере оптимизации структуры фильтра помехи c упреждением Z (t)= X (t + t 0), G (p)=  , SVX (p)= SXX (p) и выражение (3.13) переписывается в виде
, SVX (p)= SXX (p) и выражение (3.13) переписывается в виде
H (p)=  , (3.17)
, (3.17)
где SVV (p)= SXX (p)+ SUU (p)=  + c 2=
+ c 2=  . (3.18)
. (3.18)
Осуществляя факторизацию (3.18), получаем
 , (3.19)
, (3.19)
где  . (3.20)
. (3.20)
Следовательно, в рассматриваемом примере
Ф(р)=  . (3.21)
. (3.21)
Выделяя составляющую Ф+(р), будем иметь
Ф+(р)=  . (3.22)
. (3.22)
Подставив (3.19) и (3.22) в (3.17), получим
H(p)=  , (3.23)
, (3.23)
где  .
.
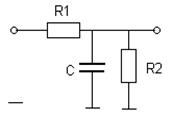 |
Из выражения (3.23) видно, что оптимальным линейным звеном, осуществляющим задачу фильтрации сигнала от помехи с упреждением, является интегрирующее звено. Если ориентироваться на пассивную электрическую схему, то линейная система может иметь вид, показанный на рис.3.4
Рис.3.4
В этой схеме  ,
,  . (3.24)
. (3.24)
Величины m и А зависят от характеристик корреляционных функций полезного сигнала и помехи, которые предполагаются известными. Следовательно, на основании двух выражений (3.24) должны быть определены три параметра схемы рис.3.4. Поэтому один из этих параметров может быть принят произвольно, исходя из каких-либо соображений; два других же параметра определятся из выражений (3.24).