Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Определение продольных уклонов
|
|
Наибольший продольный уклон, преодолеваемый автомобилем, определяется из условия его движения на подъем на III передаче. При этом принимается допущение, что движение автомобиля происходит с равномерной (расчетной) скоростью. Наибольший продольный уклон при этих условиях:
 , (2.3)
, (2.3)
где Дmax – динамический фактор;
f – коэффициент сопротивления качению;
imax – продольный уклон дороги, ‰.
Динамический фактор:
 , (2.4)
, (2.4)
где G – вес автомобиля, Н.
Ра – сила тяги, кН;
РW – сила сопротивления воздуха, Н.
Сила тяги при скорости автомобиля на III передаче:
 , (2.5)
, (2.5)
Кр – коэффициент размерности (Кр =9, 55);
η – механический коэффициент полезного действия трансмиссии автомобиля (для грузовых двухосных автомобилей принимается равным 0, 9, для трехосных – 0, 80, для легковых автомобилей – 0, 92);
nv – частота вращения коленчатого вала, об./мин.
Расчет наибольшего продольного уклона для расчетного грузового автомобиля выполняется с использованием математической зависимости эффективной мощности двигателя от частоты вращения коленчатого вала, предложенной С. Д. Лейдерманом:
 , (2.6)
, (2.6)
где Ne mах – максимальная мощность двигателя, кВт;
λ – отношение частоты вращения коленчатого вала двигателя при движении автомобиля со скоростью V к частоте вращения при максимальной скорости;
a, b, c – эмпирические  коэффициенты уравнения, значения которых для грузовых автомобилей:
коэффициенты уравнения, значения которых для грузовых автомобилей:
– с карбюраторными двигателями – а=b=c=1;
– с дизельными двигателями – а= 0, 87; b= 1, 13; с= 1.
Наибольший продольный уклон при движении грузового автомобиля на III передаче определяется в следующей последовательности:
По графикам динамических характеристик автомобилей [4, 6, 7] находится скорость автомобиля на III передаче VIII.
Далее определяется частота вращения коленчатого вала двигателя при скорости автомобиля VIII по формуле:
 , (2.7)
, (2.7)
где nv – частота вращения коленчатого вала, об./мин;
VIII – скорость движения автомобиля, км/ч;
i0 и ik3 – передаточные числа главной передачи и коробки передач;
rk – радиус качения колес автомобиля, м.
Определяется максимальная частота вращения коленчатого вала при движении автомобиля на прямой передаче по формуле:
 , (2.8)
, (2.8)
где nmax – максимальная частота вращения коленчатого вала двигателя при движении автомобиля на прямой передаче, об./мин;
Vmax – максимальная скорость движения автомобиля на прямой передаче, км/ч;
i0 и ik4(5) – передаточные числа главной передачи и прямой передачи;
rk – радиус качения колес автомобиля, м.
Находится отношение частоты вращения коленчатого вала двигателя при скоростях VIII и Vmax:
 , (2.9)
, (2.9)
Определяется частота вращения коленчатого вала двигателя NV по формуле (6).
Определяется необходимая для вычисления динамического фактора сила тяги при скорости автомобиля на III передаче по формуле (2.5).
Сила сопротивления воздуха:
 , (2.10)
, (2.10)
где F – лобовая площадь автомобиля, F=0, 77∙ В∙ Н;
В – ширина автомобиля, м;
Н – высота автомобиля, м;
К – коэффициент обтекаемости автомобиля, кг/м2 (для легковых автомобилей K= 0, 05 – 0, 30, для грузовых – K= 0, 5 – 0, 7).
Далее определяется наибольший продольный уклон, который обеспечит движение автомобиля с постоянной скоростью на III передаче:
 , (2.11)
, (2.11)
 , (2.12)
, (2.12)
где f0 – коэффициент сопротивления качению, принимается для дорог I и II категории 0, 01 – 0, 02, III и IV категории – 0, 015 – 0, 025;
fV – то же, при скорости движения автомобиля от 50 до 150 км/ч.
Полученное значение уклона проверяется по условию сцепления. Динамический фактор при мокром и грязном покрытии определяется по формуле:
 , (2.13)
, (2.13)
где φ – коэффициент сцепления колеса с покрытием (φ =0, 2);
Gсц – давление на заднюю ось (тележку), Н.
 . (2.14)
. (2.14)
Для движения автомобиля без пробуксовки необходимо, чтобы выполнялось условие:
 . (2.15)
. (2.15)
Для расчета максимальных продольных уклонов, преодолеваемых легковым автомобилем, используются графики динамических характеристик легковых автомобилей [4, 6, 7]. Находится максимальное значение динамического фактора и скорости движения легкового автомобиля на каждой передаче.
По формуле (2.3) вычисляются максимальные значения продольных уклонов. Результаты расчетов записываются в таблицу 2.4.
Таблица 2.4 – Результаты расчетов максимальных продольных уклонов, преодолеваемых легковым автомобилем
| Передачи | Значение Дmax | Величина fV | Скорость км/ч | 
|
| I | 0, 042 | 0, 02 | 0, 042-0, 02=0, 040=40 ‰ | |
| II | ||||
| III | ||||
| IV |
Полученные расчетом величины imax для грузового и легкового автомобилей сравниваются с imax для данной технической категории дороги, приведенными в СНиП 2.05.02-85 (табл. 10).
Определение нормативных радиусов для проектирования кривых в плане
Радиус кривой в плане, при котором возможно движение автомобиля с расчетной скоростью при условии устройства виража, переходных кривых и уширения проезжей части, определяется по формуле:
 , (2.16)
, (2.16)
где V – расчетная скорость движения для данной категории дороги, км/ч;
iв – поперечный уклон проезжей части на вираже (принимается в соответствии с требованиями СНиП 2.05.02-85, табл. 8);
μ – коэффициент поперечной силы, принимаемый по графику (рисунок 2).
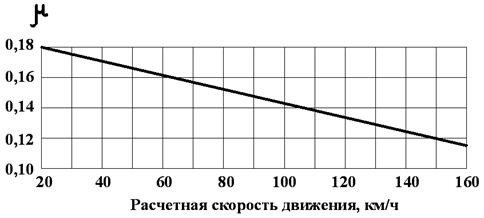
Рисунок 2.2 – График зависимости коэффициента поперечной силы от скорости движения автомобиля [1]
Значение коэффициента поперечной силы µ должно удовлетворять одновременно условиям устойчивости автомобиля против опрокидывания, устойчивости против заноса, удобства пассажиров при проезде по кривой и экономичности работы автомобиля.
Рекомендуется для определения радиуса, не требующего переходных кривых и виража, принимать для дорог I и II категорий µ =0, 05 и для дорог III категории (и ниже) – µ =0, 1.
При определении наименьшего радиуса, применяемого на трудных участках, в зависимости от сложности вписывания кривой может быть допущена величина μ =0, 15 – 0, 20. При сравнительно простых условиях проектирования следует принимать μ =0, 10, особенно для дорог высокой категории.
По условию видимости в ночное время минимальный радиус кривой вычисляется по формуле:
 , (2.17)
, (2.17)
где S1 – расстояние видимости поверхности дороги, определенное по СНиП 2.05.02-85 (табл. 10) для заданной расчетной скорости движения, м;
α – угол расхождения пучка света фар (α ≈ 2°).
Наименьшие радиусы кривых в плане без устройства виража рассчитываются по формуле:
 , (2.18)
, (2.18)
где i1 – поперечный уклон проезжей части, ‰ (определяется по СНиП 2.05.02-85, табл. 7).
Вычисленные радиусы кривых в плане сравниваются с приведенными в СНиП 2.05.02-85.
2.2.4 Определение расстояний видимости
В теории проектирования дорог предложено несколько схем видимости по условиям движения автомобилей и расположению автомобилей и препятствий на дороге. Принципиально различают следующие группы:
1. Схемы, предусматривающие остановку автомобиля перед препятствием или встречным автомобилем.
Расчетное расстояние видимости поверхности дороги находится из выражения:
 . (2.19)
. (2.19)
где V – расчетная скорость движения по проектируемой автомобильной дороги;
Кэ – коэффициент, учитывающий эффективность тормозов (для легкового автомобиля принимается К =1, 3; для грузовых и автобусов – К =1, 85);
φ 1 – коэффициент продольного сцепления, принимается равным 0, 50;
l0 – зазор безопасности, принимаемый равным 5 – 10 м.
Расчетное расстояние видимости встречного автомобиля находится по формуле:
 . (2.20)
. (2.20)
2. Схемы, исходящие из объезда автомобилем препятствия или обгона попутного автомобиля с заездом на смежную полосу движения.
Расстояние видимости из условия обгона:
 . (2.21)
. (2.21)
где V1 и V2 – соответственного скорости обгоняющего и обгоняемого автомобиля. Для расчетов принимаются расчетные скорости для легкового и грузового автомобилей при принятой технической категории;
lа – средняя длина автомобиля, м, принимается 5 – 7 м.
На пересечениях дорог в городских условиях необходимо обеспечение достаточной боковой видимости придорожной полосы.
Минимальное необходимое расстояние боковой видимости:
 , (2.22)
, (2.22)
где Vп – скорость движения пешехода или транспортного средства по пересекающей дороги, км/ч, для пешехода – 7 – 10 км/ч, для транспортного средства – 20 – 30 км/ч.
Расстояния боковой видимости на пересечении дорог сравнивают с расчетными, которые определяют с учетом скоростей движения на пересекающихся дорогах, продолжительности ориентирования водителя и времени его реакции:
 , (2.23)
, (2.23)
где V – скорость движения;
tор – продолжительность ориентирования водителя, с;
tр – время реакции водителя, равное 1, 5 с;
Кэ – характеристика эксплуатационного состояния тормозной системы автомобиля (принимается не менее 1, 4);
j – коэффициент продольного сцепления;
i – продольный уклон (при спуске – с минусом);
D – расстояние от остановившегося автомобиля до кромки проезжей части пересекаемой дороги: D = 5 м.
Продолжительность ориентирования рассчитывают с учетом местных условий движения:
 , (2.24)
, (2.24)
где to – наименьшая продолжительность ориентирования в оптимальных условиях (для автомобильных дорог to = 1, 4 с, для населенных пунктов 1, 8 с);
К1 – коэффициент, учитывающий наличие стоящих на обочинах пересекаемой дороги автомобилей (если остановка или стоянка автомобилей в пределах пересечений разрешена, то К1 =0, 32; при запрещении остановки К1 =0);
К2 – коэффициент, учитывающий плотность движения на пересекаемой дороге:
| Интенсивность движения по пересекаемой дороге, авт./ч | до 50 | |||
| К2 | 0, 15 | 0, 22 | 0, 35 | 0, 53 |
К3 – коэффициент, учитывающий интенсивность движения на дороге, с которой определяется расстояние боковой видимости:
| Интенсивность движения, aвт./ч | до 30 | |||
| К3 | 0, 12 | 0, 20 | 0, 22 |
Вычисленные расстояния видимости сравниваются с приведенными в СНиП 2.05.02-85.