Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
СУЭП экскаватора на основе аппарата нечеткой логики
|
|
Основная проблема – реализация корректирующих воздействий по значениям интегрированной ошибки и производных регулируемых переменных.
Структура фази-управления для электропривода ТВ-ГД:
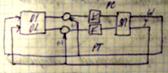
 Возможны 2 варианта построения СУЭП с фази-регулятором: 1) без испол аналоговых регуляторов и замкнутых контуров(дополнит-ых) регулирования переменных 2) ф-рег воздействует на классич контуры рег-ия переменных с аналоговыми регул-ми.(для коррекции в форму тока применяется доп. Сигнал d I/dt.
Возможны 2 варианта построения СУЭП с фази-регулятором: 1) без испол аналоговых регуляторов и замкнутых контуров(дополнит-ых) регулирования переменных 2) ф-рег воздействует на классич контуры рег-ия переменных с аналоговыми регул-ми.(для коррекции в форму тока применяется доп. Сигнал d I/dt.
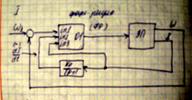
Структура фази-управления для электропривода ТП-Д:
 in1 – интеграл ошибки регулирования скорости дв-ля.
in1 – интеграл ошибки регулирования скорости дв-ля.
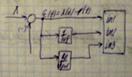
Исходя из принципов построения ф-рег аналог ПИД-рег будет иметь вид:
In2 – значение I(t)
 - доп сигнал повышающий точность регулирования угловой скорости.
- доп сигнал повышающий точность регулирования угловой скорости.
 - сигнал производной.
- сигнал производной.