Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Глава 4. Механическая часть электропривода как объект управления
|
|
Двухмассовая упругая система (рис. 2.2, б) является основным объектом при инженерных исследованиях динамических процессов с учетом упругих связей, в которой коэффициентом пропорциональности  учитывается момент внутреннего вязкого трения (диссипативные силы)
учитывается момент внутреннего вязкого трения (диссипативные силы)
 . (4.1)
. (4.1)
Структурная схема двухмассовой упругой Э.М.С. представлена на рис. 4.1, которая составлена на основании системы дифференциальных уравнений в операторном виде, где 

 (4.2)
(4.2) 
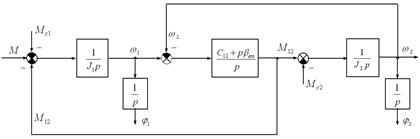
Рис. 4.1. Структурная схема двухмассовой упругой Э. М. С.
В рассматриваемой структурной схеме управляющем воздействием является электромагнитный момент двигателя М, а возмущающими воздействиями – моменты сопротивлений  . В качестве выходных координат можно рассматривать скорости
. В качестве выходных координат можно рассматривать скорости  , упругий момент
, упругий момент  и углы перемещения инерционных масс
и углы перемещения инерционных масс 
 . (4.3)
. (4.3)
Структурная схема двухмассовой системы электропривода (рис.4.1) позволяет получить передаточные функции по управляющему и возмущающим воздействиям для анализа поведения выходных координат , .
По управляющему воздействию при  после структурных преобразований в схеме (рис.4.1) передаточная функция по выходной переменной
после структурных преобразований в схеме (рис.4.1) передаточная функция по выходной переменной  определяется следующим образом (см. рис. 4.2)
определяется следующим образом (см. рис. 4.2)

Рис. 4.2. Преобразованная структурная схема по двухмассовой системы при
 ; (4.4)
; (4.4)
 , (4.5)
, (4.5)
где  – частота свободных колебаний двухмассовой упругой системы;
– частота свободных колебаний двухмассовой упругой системы;
 .
.
Передаточная функция по выходной переменной  после структурных преобразований схемы (рис. 4.3) при определяется следующим образом
после структурных преобразований схемы (рис. 4.3) при определяется следующим образом
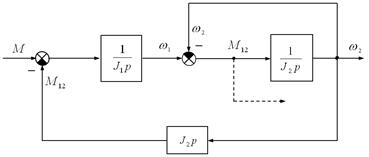
Рис. 4.3. Преобразованная структурная схема по двухмассовой системы при
 .
.
С учетом
 ;
;
 ,
,
получим
 . (4.6)
. (4.6)
Уравнение (4.5) представим в следующем виде
 . (4.7)
. (4.7)
Тогда имеем структурную схему по выходной координате  (см. рис. 4.4)
(см. рис. 4.4)

Рис. 4.4 Структурная схема по выходной координате 
Передаточная функция
 , (4.8)
, (4.8)
т.е. соответствует двум последовательно соединенным звеньям интегрирующего и колебательного.
Передаточная функция по выходной координате  в соответствии со структурными преобразованиями в схеме рис. 4.1. при может быть определена следующим образом.
в соответствии со структурными преобразованиями в схеме рис. 4.1. при может быть определена следующим образом.

Рис. 4.5. Структурные преобразования для получения передаточной функции 
Для схемы рис. 4.5, а передаточная функция
 , (4.9)
, (4.9)
а для схемы рис.4.5, б передаточная функция
 . (4.10)
. (4.10)
После соответствующих преобразований в формуле 4.10 получим
и окончательно
 . (4.11)
. (4.11)
Как видно из полученных передаточных функций  ,
,  , характеристическое уравнение системы (знаменатель в формулах 4.5, 4.6, 4.11), описывающее движение двухмассовой системы при
, характеристическое уравнение системы (знаменатель в формулах 4.5, 4.6, 4.11), описывающее движение двухмассовой системы при
 , (4.12)
, (4.12)
а корни
 . (4.13)
. (4.13)
Поведение такой системы рассмотрим на примере приложения управляющего воздействия в виде электромагнитного момента М, изменяющегося во времени по гармоническому сигналу с переменной частотой  . Амплитудно-частотные и фазочастотные характеристики такой системы, полученных при помощи (4.8), имеют вид
. Амплитудно-частотные и фазочастотные характеристики такой системы, полученных при помощи (4.8), имеют вид
 ; (4.14)
; (4.14)
 . (4.15)
. (4.15)
Анализ формул 4.14, 4.15 показывает, что при  и
и  амплитуды стремятся к бесконечности, а фаза
амплитуды стремятся к бесконечности, а фаза  при скачком изменяется на
при скачком изменяется на  (
( ). Зависимость
). Зависимость  , представлены на рис. 4.6, из которого следует, что при
, представлены на рис. 4.6, из которого следует, что при  наступает механический резонанс, претерпевает разрыв, амплитуда колебаний возрастает до бесконечности.
наступает механический резонанс, претерпевает разрыв, амплитуда колебаний возрастает до бесконечности.

Рис. 4.6 Амплитудно-частотная АЧX и фазовая частотная ФЧХ характеристики двухмассовой системы
В реальных механических системах происходит ограничение резонансных амплитуд колебаний силами, обуславливающими рассеяние энергии механических колебаний. К внешним силам относятся трение колеблющейся системы о среду, к внутренним – диссипативные силы в упругих элементах (силы вязкого трения).
Система уравнений, описывающая движение двухмассовой системы с учетом сил вязкого трения (коэффициент β в.т= β 12) представлена в виде (4.2), структурная схема на рис. 4.1.
Произведя структурные преобразования схемы рис. 1.2, получим передаточную функцию по управляющему воздействию
 . (4.16)
. (4.16)
Если обозначить
 ;
;
 ,
,
то уравнение (4.16) запишется в виде
 . (4.17)
. (4.17)
Корни характеристического равнения системы
 . (4.18)
. (4.18)
Выражение (4.18) показывает, что силы вязкого терния вносят в систему затухание и двухмассовая упругая система приобретает свойства колебательного звена с коэффициентом затухания  и частотой колебаний
и частотой колебаний  . Так как
. Так как  ,
,  .
.
Логарифмический декремент затухания  , представляющий собой отношения двух последующих амплитуд колебаний
, представляющий собой отношения двух последующих амплитуд колебаний  (рис. 4.27), характеризует рассеяние энергии в упругом звене. Он может быть определен по известной величине действительной и мнимой части корней характеристического уравнения (4.18).
(рис. 4.27), характеризует рассеяние энергии в упругом звене. Он может быть определен по известной величине действительной и мнимой части корней характеристического уравнения (4.18).

Рис. 4.7. К определению логарифмического декремента затухания
 . (4.19)
. (4.19)
Исследование показывают, что естественное механическое демпфирование обеспечивает значение  . При таких значениях , несмотря на ограничение амплитуд резонансных колебаний, резонансный пик остается по-прежнему большим и колебания в зоне резонанса увеличиваются в (10-30) раз.
. При таких значениях , несмотря на ограничение амплитуд резонансных колебаний, резонансный пик остается по-прежнему большим и колебания в зоне резонанса увеличиваются в (10-30) раз.
Выражение АЧХ для двухмассовой системы с учетом демпфирования принимает вид
 . (4.20)
. (4.20)
На рис. 4.8 приводятся зависимости резонансного коэффициента усиления системы от частоты, рассчитанные в соответствии с (4.20) для различных значений .

Рис. 4.8. Зависимости резонансного коэффициента усиления системы от частоты