Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамические режимы механической части электропривода при учете свойств двигателя
|
|
Динамические режимы механической части рассматривались для случая независимости электромагнитного момента двигателя от его скорости. Момент двигателя принимался постоянным  , на самом же деле за счет электромеханической связи, осуществляемой посредством зависимости ЭДС рабочих обмоток двигателя от скорости, момент двигателя является функцией скорости
, на самом же деле за счет электромеханической связи, осуществляемой посредством зависимости ЭДС рабочих обмоток двигателя от скорости, момент двигателя является функцией скорости  – это механическая характеристика двигателя. Не вдаваясь в подробности физических процессов электромеханического преобразования энергии в различных типах электрических машин (постоянного, переменного тока), можно отметить, что механические характеристики при определенных допущениях и пренебрежении электромагнитной инерции силовых цепей являются линейными или линеаризованными характеристиками, а именно
– это механическая характеристика двигателя. Не вдаваясь в подробности физических процессов электромеханического преобразования энергии в различных типах электрических машин (постоянного, переменного тока), можно отметить, что механические характеристики при определенных допущениях и пренебрежении электромагнитной инерции силовых цепей являются линейными или линеаризованными характеристиками, а именно
 , (5.14)
, (5.14)
где А, В – постоянные коэффициенты.
На рис. 5.3. представлена линейная механическая характеристика двигателя постоянного тока независимого (параллельного) возбуждения и графики переходных процессов 
 .
.

Рис. 5.3. Механическая характеристика двигателя (а) и переходные процессы при пуске вхолостую (сплошные линии) и под нагрузкой (штриховые линии)
Найдем коэффициенты А, В уравнения (5.14). При 
 , при
, при 
 , откуда
, откуда
 , (5.15)
, (5.15)
где  – жесткость механической характеристики двигателя.
– жесткость механической характеристики двигателя.
По величине жесткости механических характеристик двигателей оценивается степень изменения скорости двигателей при изменении нагрузки.
Переходные процессы в одномассовой электромеханической системе описывается следующей системой уравнений

 (5.16)
(5.16)
Момент двигателя можно представить в следующим виде
 , (5.17)
, (5.17)
аналогично момент статистических сопротивлений
 . (5.18)
. (5.18)
Подставив (5.17, 5.18.) в уравнение движения (5.16.), получим дифференциальное уравнение переходных процессов с нагрузкой
 , (5.19)
, (5.19)
а в переходных процессах без нагрузки
 , (5.20)
, (5.20)
где  – скорость идеального холостого хода двигателя (для двигателей постоянного тока независимого возбуждения определяется приложенным напряжениям и магнитным потоком, для асинхронных двигателей частотой напряжения, подводимого к статору);
– скорость идеального холостого хода двигателя (для двигателей постоянного тока независимого возбуждения определяется приложенным напряжениям и магнитным потоком, для асинхронных двигателей частотой напряжения, подводимого к статору);
 – электромеханическая постоянная времени, определяющая интенсивность и время протекания переходного процесса.
– электромеханическая постоянная времени, определяющая интенсивность и время протекания переходного процесса.
Физический смысл электромеханической постоянной времени – это время, в течение которого двигатель разгоняется до скорости под действием неизменного момента, равного  .
.
Решение дифференциальных уравнений (5.19.), (5.20.) находится в виде
 , (5.21)
, (5.21)
 , (5.22)
, (5.22)
где  – постоянная интегрирования, определяемая из начальных условий.
– постоянная интегрирования, определяемая из начальных условий.
При  и
и  , тогда получим при пуске под нагрузкой
, тогда получим при пуске под нагрузкой
 ,
,
без нагрузки
 ,
,
а уравнения  ,
,  запишутся соответственно
запишутся соответственно
 ; (5.23)
; (5.23)
 ; (5.24)
; (5.24)
 ; (5.25)
; (5.25)
 . (5.26)
. (5.26)
Ускорение привода под нагрузкой
 , (5.27)
, (5.27)
без нагрузки
 . (5.28)
. (5.28)
Максимальное ускорение соответственно при 
 , (5.29)
, (5.29)
 . (5.30)
. (5.30)
Время переходного процесса под нагрузкой
 ; (5.31)
; (5.31)
без нагрузки
 ; (5.32)
; (5.32)
В переходных процессах при пуске 
 и уравнение ,
и уравнение ,  могут быть записаны в виде
могут быть записаны в виде
 ; (5.33)
; (5.33)
 ; (5.34)
; (5.34)
 ; (5.35)
; (5.35)
 ; (5.36)
; (5.36)
 ; (5.37)
; (5.37)
 . (5.38)
. (5.38)
Как следует из уравнений (5.37) и (5.38), время пуска теоретически равно  . Практически переходные процессы заканчиваются при вхождении скорости (момента) в 5% зону отклонений от заданных значений. Следовательно, время пуска определится
. Практически переходные процессы заканчиваются при вхождении скорости (момента) в 5% зону отклонений от заданных значений. Следовательно, время пуска определится


Таким образом, в приводах с линейными механическими характеристиками время переходных процессов не зависит от нагрузки и составляет  .
.
По уравнениям (5.33. – 5.36.) рассчитаны зависимости ,  которые представлены на рис. 5.3, б.
которые представлены на рис. 5.3, б.
 Систему уравнений (5.16) можно представить в следующем виде
Систему уравнений (5.16) можно представить в следующем виде
 (5.39)
(5.39)
 Переходя к операторному изображению уравнений (5.39), получим
Переходя к операторному изображению уравнений (5.39), получим
 (5.40)
(5.40)
Системе уравнений (5.40) соответствует структурная схема электромеханической системы с линейными механическими характеристиками, представленная на рис. 5.4.
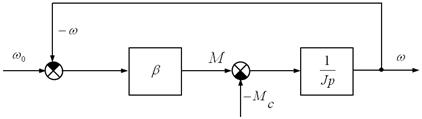
Рис 5.4. Структурная схема одномассовой электромеханической системы с линейными механическими характеристиками.
Передаточная функция по управляющему воздействию
 , (5.41)
, (5.41)
соответствует инерционному звену с постоянной времени  . Частотные характеристики электромеханической системы
. Частотные характеристики электромеханической системы
показаны на рис. 5.5, а переходные и весовые функции,
определяемые соотношениями
 ; (5.42)
; (5.42)
 , (5.43)
, (5.43)
соответствуют , рис. 5.3, б.
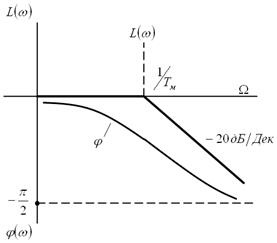
Рис. 5.5. Частотные характеристики электромеханической системы с линейными механическими характеристиками
Рассмотрим на примере пуска двухмассовой электромеханической части электропривода при учете упругих связей и диссипативных сил.
При условии  ,
,  ,
,  система уравнений (3.15) в операторном виде запишется следующим образом
система уравнений (3.15) в операторном виде запишется следующим образом

 (5.44)
(5.44)
Решим систему уравнений (5.44) относительно упругого момента  . Для этого найдем выражение для
. Для этого найдем выражение для 
 ;
;
и подставив их в последнее уравнение системы (5.44), получим
 . (5.45)
. (5.45)
Проведем некоторые преобразования в (5.45)
 .
.
Далее с учетом того, что
 – частота свободных колебаний;
– частота свободных колебаний;
 – среднее ускорение при пуске,
– среднее ускорение при пуске,
получим
 . (5.46)
. (5.46)
Характеристическое уравнение
 ,
,
имеет два мнимых корня
 ,
,
а решение уравнения (5.46) запишется в виде
 . (5.47)
. (5.47)
а) при пуске вхолостую (Мс=0)
Постоянные интегрирования А, В могут быть найдены из начальных условий:
а) при 





 .
.
В этом случае решение может быть записано в виде

или окончательно
 . (5.48)
. (5.48)
Зависимость  получим подстановкой (5.48) в уравнение движение первой массы (5.44)
получим подстановкой (5.48) в уравнение движение первой массы (5.44)

После интегрирования
 . (5.49)
. (5.49)
С учетом 
 . (5.50)
. (5.50)
Аналогично постановкой (5.48) во второе уравнение системы (5.44) получим зависимость 
 ;
;
Окончательно
 . (5.51)
. (5.51)
б) пуск под нагрузкой  при
при 
В этом случае при отсутствии зазоров движение первой массы на этапе, когда  , осуществляется по уравнению
, осуществляется по уравнению
вторая масса  неподвижна, идет закручивание вала между массами
неподвижна, идет закручивание вала между массами  и . Структурная схема электропривода при
и . Структурная схема электропривода при  представлена на рис. 5.6.
представлена на рис. 5.6.
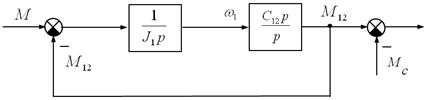
Рис.5.6. Структурная схема электропривода при пуске 
На первом этапе переходного процесса момент упругой связи в соответствии со структурной схемой (рис. 5.6)
 . (5.52)
. (5.52)
Дифференциальное уравнение, соответствующее (5.52)
 . (5.53)
. (5.53)
Характеристическое уравнение
 , (5.54)
, (5.54)
корни уравнения
 . (5.55)
. (5.55)
Решение дифференциального уравнения (5.53)
 . (5.56)
. (5.56)
С учетом начальных условий при 
 ;
;  ;
;

 – начальное ускорение.
– начальное ускорение.
Коэффициент  определится из уравнения
определится из уравнения
 ,
,
откуда
 .
.
Переходная функция упругого момента на I этапе пуска
 . (5.57)
. (5.57)
На II этапе пуска 
 , (5.58)
, (5.58)
где А, В – постоянные интегрирования, находятся из ненулевых условий второго этапа при  ;
;  ; ;
; ;
 ;
;  .
.
Уравнение переходной функции  на втором этапе пуска
на втором этапе пуска
 . (5.59)
. (5.59)
Ниже рассматриваются расчеты переходных процессов в двухмассовой системе электропривода методом структурного моделирования с использованием пакета MATLAB – Simulink для различных условий пуска. Параметры двухмассовой системы электропривода:
 ;
;  ;
;  ;
;  ;
;  ;
; 
 .
.
1. Переходные процессы  ;
;  ;
;  ; ;
; ;  .
.
Схема модели двухмассовой системы по управляющему воздействию  представлена на рис. 5.7.
представлена на рис. 5.7.
Механическая характеристика привода для этого режима пуска представлена на рис. 5.8. (кривая  ;
;  )
)
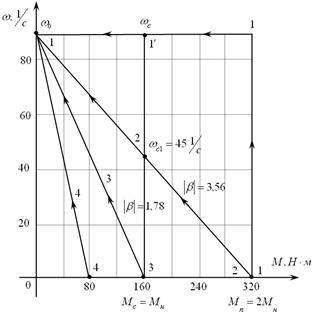
Рис. 5.8. Механические характеристики привода при  ;
;  ;
;  ;
; 
Кривые переходного процесса для пуска 
 ;
;  ;
;  ; представлены на рис. 5.9 – 5.12.
; представлены на рис. 5.9 – 5.12.
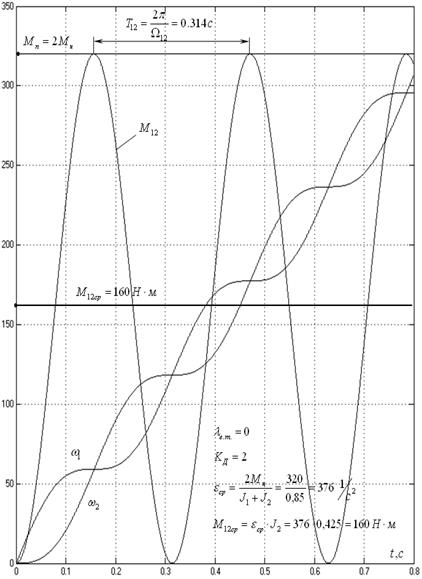
Рис. 5.9.  ; ;
; ;

Рис. 5.10. ;  ;
;
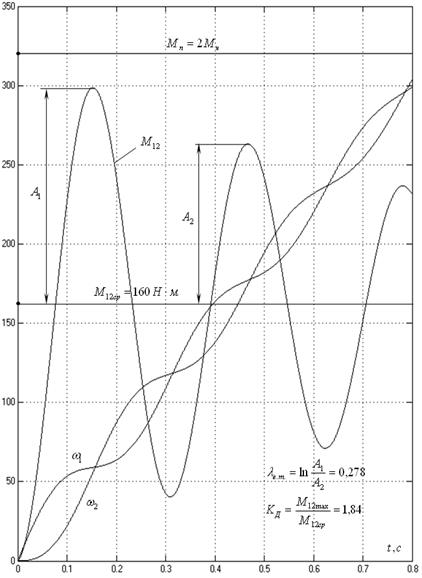
Рис. 5.11. ; ;
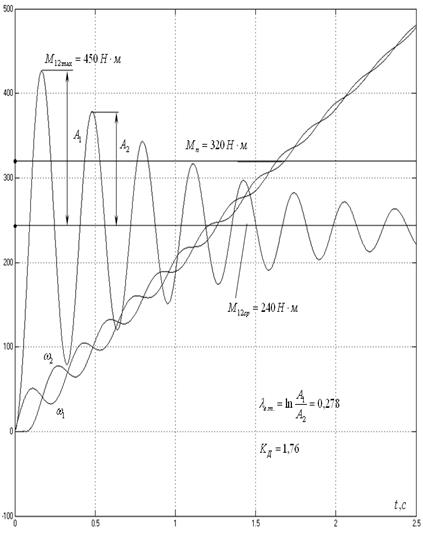
Рис. 5.12. ;  ;
;
Как видно из рис. 5.9., 5. 10. пуск двухмассовой системы при ,  , сопровождается колебаниями
, сопровождается колебаниями  ,
,  ,
,  с частотой
с частотой  , периодом колебаний
, периодом колебаний 
Если бы механические связи были абсолютно жесткими ( ), то колебания масс не возникали и скорости и изменялись по линейному закону
), то колебания масс не возникали и скорости и изменялись по линейному закону  , а нагрузка между массами и имела величину
, а нагрузка между массами и имела величину  .
.
Следовательно, упругие колебания, не влияя на длительность переходных процессов, могут привести к существенному увеличению максимальных нагрузок в передачах, значительно превышающих среднюю. Это превышение характеризуется динамическим коэффициентом
 . (5.60)
. (5.60)
Максимум составляющей нагрузки упругого элемента наступает в момент времени  , где
, где  и имеет величину
и имеет величину  . Отсюда выражение для динамического коэффициента при пуске электропривода под нагрузкой
. Отсюда выражение для динамического коэффициента при пуске электропривода под нагрузкой
 . (5.61)
. (5.61)
Соотношение (5.61) показывает, что динамический коэффициент увеличивается с ростом ,  и при больших значениях и пуске вхолостую
и при больших значениях и пуске вхолостую  может достигать значений
может достигать значений  .
.
При пуске без нагрузки  (рис. 5.11.) и с нагрузкой
(рис. 5.11.) и с нагрузкой  (рис.5.12.) среднее ускорение сохраняется
(рис.5.12.) среднее ускорение сохраняется  и
и  , максимальные значения упругих моментов снижаются на 7, 8 и 5, 6 %.
, максимальные значения упругих моментов снижаются на 7, 8 и 5, 6 %.
Внутренние диссипативные силы в системе вследствие их малости вызывают незначительные затухания колебания и изменений их частоты. Даже при  обеспечивается снижение динамического коэффициента на 15%, что позволяет в ряде инженерных расчетов не учитывать демпфирование.
обеспечивается снижение динамического коэффициента на 15%, что позволяет в ряде инженерных расчетов не учитывать демпфирование.
Упругие механические колебания увеличивают динамические нагрузки передач и рабочего оборудования, тем самым, ускоряя их износ. Неравномерность движения рабочего органа снижает точность выполнения технологических операций. Поэтому при проектировании электропривода необходимо принимать меры, позволяющие снизить динамические нагрузки.
Эффективным средством снижения динамических (колебательных) нагрузок в механическом оборудовании и силовом канале электропривода является увеличение плавности переходных процессов.
2. Пуск по реостатной характеристике  при линейно-изменяющегося от скорости динамического момента (характеристики 2-2-1, 3-3-1, 4-4-1, рис. 5.8). Жесткость механических характеристик
при линейно-изменяющегося от скорости динамического момента (характеристики 2-2-1, 3-3-1, 4-4-1, рис. 5.8). Жесткость механических характеристик  ; 1, 78; 0, 89;
; 1, 78; 0, 89;  .
.
Схема модели двухмассовой системы по управляющему воздействию для указанных случаев представлена на рис. 5.13. Переходные процессы на рис. 5.14 – 5.19 при пуске без нагрузки.
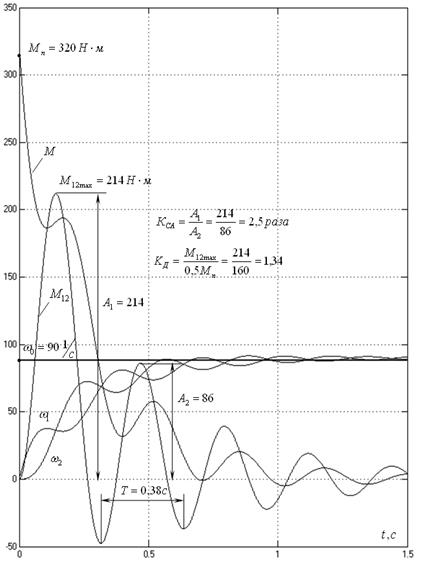
Рис. 5.14. ;  ;
;  ; ;
; ;
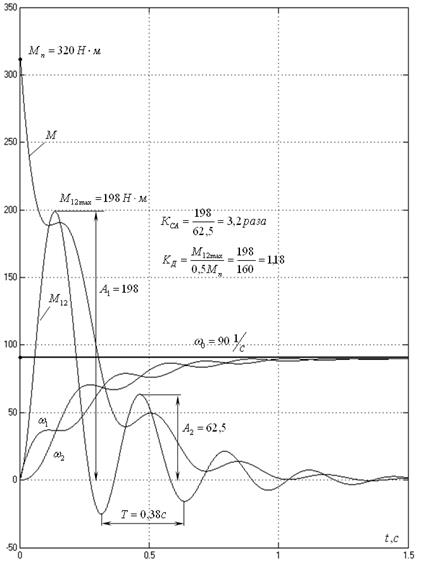
Рис. 5.15. ; ; ; ;
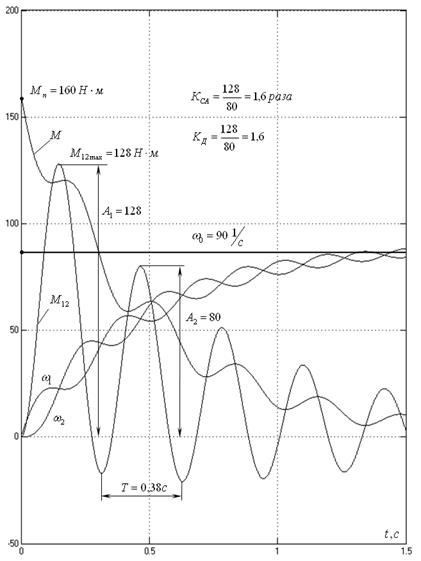
Рис. 5.16.  ; ;
; ;  ; ;
; ;
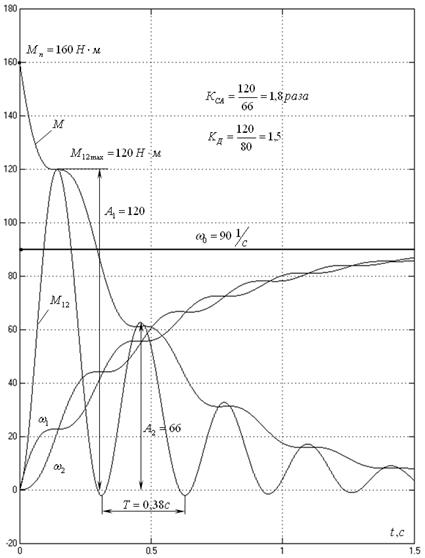
Рис. 5.17. ; ; ; ;
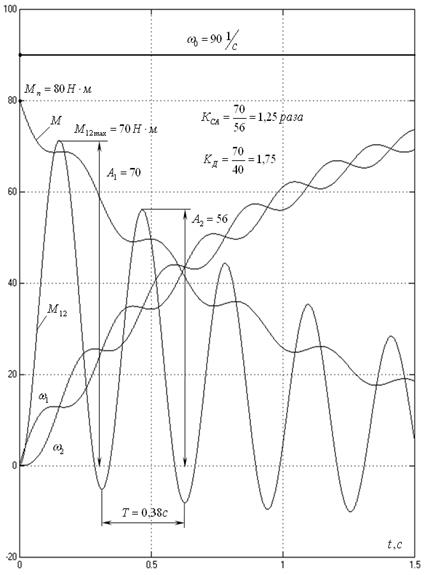
Рис. 5.18.  ; ;
; ;  ; ;
; ;
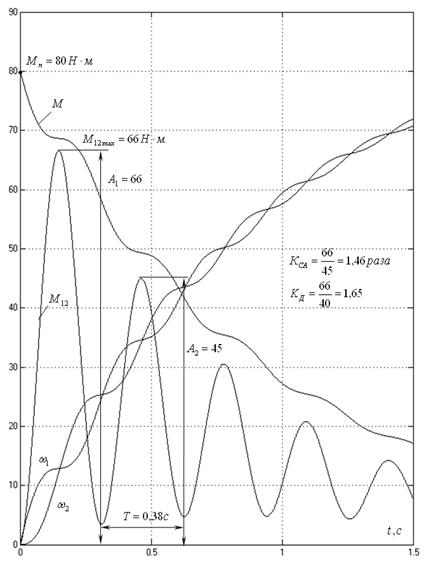
Рис. 5.19. ; ; ; ;
Анализ переходных процессов с добавочными сопротивлениями в якорной цепи двигателя постоянного тока и в роторной цепи асинхронных двигателей с фазным ротором (осциллограммы на рис. 5.14 – 5.19) показывает
1) колебательность переходного процесса заметно уменьшается;
2) снижается максимальное значение упругого момента  ;
;
3) уменьшается динамический коэффициент  .
.
На рис. 5.20. представлены зависимости динамического коэффициента и коэффициента снижения амплитуды колебаний момента  от величины жесткости механических характеристик двигателей (рис. 5.8)
от величины жесткости механических характеристик двигателей (рис. 5.8)
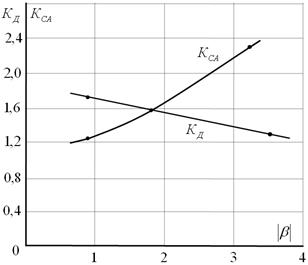
Рис. 5.20. Зависимости , от жесткости механических характеристик двигателей
4. Пуск с формированием управляющего воздействия от задатчика интенсивности ЗИ
Управляющее воздействие линейно-изменяющееся во времени с ограничением на уровне представлено на рис. 5.21.
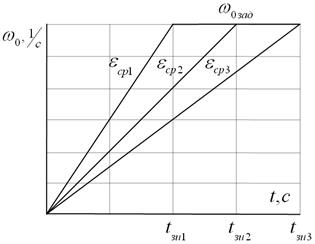
Рис. 5.21. Формирование управляющего воздействия при различных значениях
Здесь
 , (5.23)
, (5.23)
где  – среднее ускорение.
– среднее ускорение.
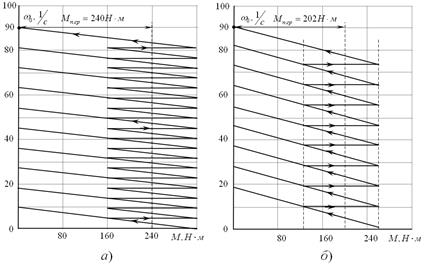
Рис. 5.22. Механические характеристики электропривода при пуске с задатчиком интенсивности для  (а),
(а),  (б)
(б)
На рис. 5.23 представлена схема модели двухмассовой системы с формированием управляющего воздействия согласно (5.23). Можно представить, что пуск двигателя происходит путем перехода с одной механической характеристики  на другую
на другую  под действием среднего пускового момента (рис. 5.22)
под действием среднего пускового момента (рис. 5.22)
 , (5.62)
, (5.62)
а с момента времени  переходный процесс до
переходный процесс до  происходит при неизменном значении управляющего воздействия .
происходит при неизменном значении управляющего воздействия .
На рис. 5.24 – 5.27 представлены графики переходных процессов  ,
,  ,
,  ,
,  в двухмассовой упругой системы для рассматриваемых параметров электропривода для
в двухмассовой упругой системы для рассматриваемых параметров электропривода для  0, 478; 0, 717; 0, 956с;
0, 478; 0, 717; 0, 956с;  ; жесткость линейных механических характеристик , а на рис. 5.29 переходного процесса при
; жесткость линейных механических характеристик , а на рис. 5.29 переходного процесса при  ; жесткость характеристик .
; жесткость характеристик .
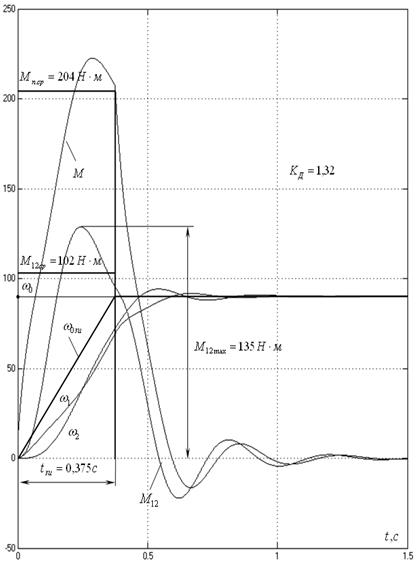
Рис. 5.24. Пуск от задатчика интенсивности
 ;
;  ;
;
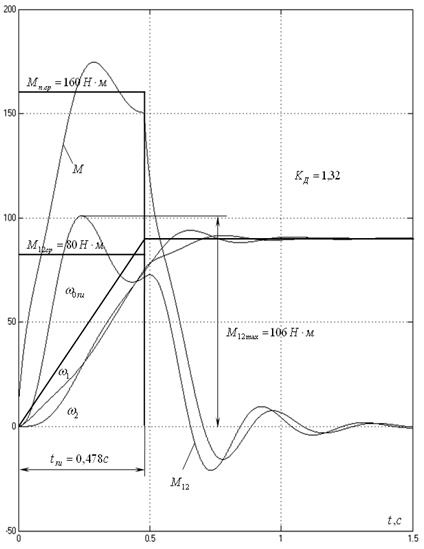
Рис. 5.25. Пуск от задатчика интенсивности
 ; ;
; ;
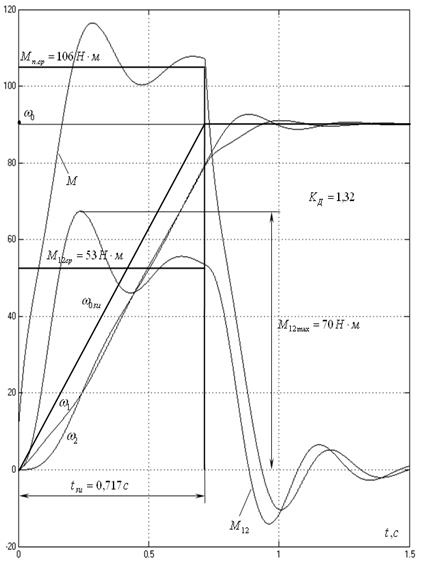
Рис. 5.26. Пуск от задатчика интенсивности
 ; ;
; ;
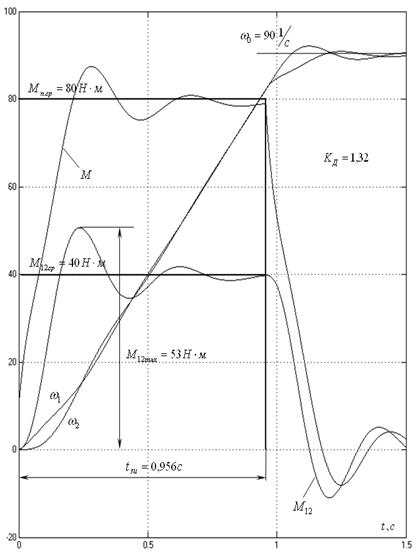
Рис. 5.27. Пуск от задатчика интенсивности
 ; ;
; ;

Рис. 5.28. Пуск от задатчика интенсивности
;  ;
;
Анализ переходных процессов показал, что
1) переходные процессы при линейно - изменяющемся задании (что соответствует линейному изменению  или
или  и ) менее колебательные, чем при
и ) менее колебательные, чем при  (случай 1) и при
(случай 1) и при  - реостатный пуск (случай 2);
- реостатный пуск (случай 2);
2) величины максимальных значений пускового момента М, упругого момента значительно меньше, например, из осциллограммы рис. 5.14. 
 тогда как из осциллограммы рис. 5.24
тогда как из осциллограммы рис. 5.24 
 при практически одинаковом времени пуска;
при практически одинаковом времени пуска;
3) динамический коэффициент  от
от  не зависит;
не зависит;
4) с увеличением жесткости механических характеристик привода происходит увеличение  и
и  и снижение (см. осциллограммы рис. 5.24 и 5.28)
и снижение (см. осциллограммы рис. 5.24 и 5.28)