Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Краевая задача принципа максимума
|
|

| (2.11) |
| (2.12) |
Так как задача (2.1)-(2.5) со свободным правым концом, условия трансверсальности необходимы

| (2.13) |

| (2.14) |
Найдем максимальное положение управления  в гамильтониане Н из (2.6) во всей области значений переменных x1, x2 ,
в гамильтониане Н из (2.6) во всей области значений переменных x1, x2 ,  . Рассмотрим зависимость Н по
. Рассмотрим зависимость Н по  , зависимость линейна, следовательно, максимум достигается на концах отрезка.
, зависимость линейна, следовательно, максимум достигается на концах отрезка.
Проинтегрируем (2.12), и, используя условие трансверсальности (2.13) найдем константу, тогда  . Кроме того (2.13) и (2.14) в уравнение (2.11) дают
. Кроме того (2.13) и (2.14) в уравнение (2.11) дают  . Заметим, что
. Заметим, что  . Из непрерывности множителей
. Из непрерывности множителей  следует, что существует
следует, что существует  такое, что
такое, что

| (2.15) |

| (2.16) |
Для устранения неоднозначности оптимального управления аналитического решения необходимо рассмотреть все случаи решения  .
.
Найдем  и
и 

Проинтегрируем  по t и получим следующее:
по t и получим следующее:

| (2.17) |
Вычисление показывает, что предположение (2.15) справедливо для  . Поэтому давайте предположим, что существует точка
. Поэтому давайте предположим, что существует точка  такая, что
такая, что

| (2.18) |
В силу (2.16) на интервале  мы получаем, что
мы получаем, что  . Теперь (2.11) дает, с учетом непрерывности
. Теперь (2.11) дает, с учетом непрерывности  в точке
в точке  :
:

| (2.19) |
Легко проверить, что  поскольку
поскольку  и
и  , из выпуклости функции
, из выпуклости функции  и следует, что предположение (2.18) выполняется с τ ’= 0.
и следует, что предположение (2.18) выполняется с τ ’= 0.
В результате управление удалось построить как функцию времени:
| (2.20) |
Полученную функцию подставим в дифференциальные уравнения (2.11), (2.12) и проинтегрируем их с заданными начальными условиями по участкам непрерывности функции , соблюдая непрерывность фазовых координат на границе соседних участков.
Сначала решим первое дифференциальное уравнение, поскольку оно не содержит  , разделим переменные, проинтегрируем и выделим
, разделим переменные, проинтегрируем и выделим  :
:

| (2.21) |

| (2.22) |
Подставив исходное уравнение и используя начальные условия, получим, что

| (2.23) |

| (2.24) |
Решая второе дифференциальное уравнение, проинтегрируем и выделим , подставив вместо полученное значение:

| (2.25) |

| (2.26) |
Используя динамику и начальное условие на траектории, получим решения подозрительные на оптимальность:
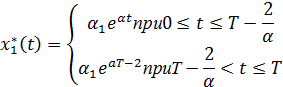
| (2.27) |
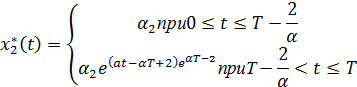
| (2.28) |
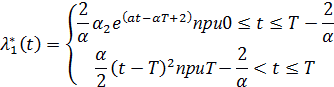
| (2.29) |
|
| (2.30) |