Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Выбор схемы включения двигателя, построение механических характеристик
|
|
Для выбранного двигателя выберем схему его включения, схему работы двигателя на постоянной скорости и схему торможения. При выборе схемы пуска необходимо знать число пусковых ступеней, зависящих от типа станции управления. Для двигателя параллельного возбуждения можно принять в расчет станцию управления двигателем ПУ 1321 (панель управления двигателем параллельного возбуждения).
Характеристика ПУ 1321: управление реверсивным двигателем с динамическим торможением. Управление от командоконтроллера. Пуск в функции времени, торможение в функции ЭДС, три ступени пускорегулирующего сопротивления. На рисунке 2 показана силовая часть схемы управления двигателем.
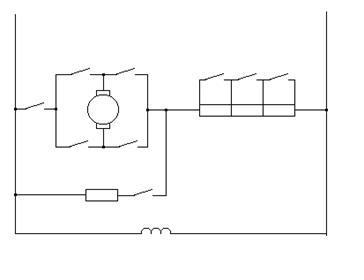
Рисунок 2 – Схема реверсивного управления с динамическим торможением двигателем параллельного возбуждения
Данная схема позволяет осуществить разгон двигателя до основной скорости путем переключения ступеней пускового реостата контакторами управления 3У, 2У и 1У. При динамическом торможении размыкается линейный контактор Л, контактор Т замыкает якорную обмотку на тормозной резистор rт. Реверсирование осуществляется контакторами направления 1В, 2В, 1Н, 2Н.
Значение максимального и минимального моментов двигателя при пуске зависят от типа пуска.
В нашем случае выгоднее принять форсированный пуск, поскольку двигатель будет работать в повторно-кратковременном режиме, и по производственным условиям необходим быстрый разгон двигателя. Поэтому при пуске максимальный момент выбирается близким к предельно-допустимому (М1*=2, 0).
Номинальный момент: МН*=1, в именованных единицах определим номинальный момент по соотношению:
 ;
;
Величины статических моментов тележки с грузом и без груза соответственно:
 ;
;
 .
.
После расчета моментов определим сопротивления схемы рисунка 2.
Из каталожных данных двигателя Д-32 известно полное сопротивление якорной цепи:

где rя - сопротивление якоря;
rДП - сопротивление добавочных полюсов.
Далее расчет будем проводить в относительных единицах и за базисное сопротивление примем номинальное сопротивление двигателя Rн, Ом:
 (16)
(16)
где Uн - номинальное напряжение (Uн=220 В);
Iн.- номинальный ток якоря, А.
Тогда:
Полные сопротивления ступеней связаны системой:
 (17)
(17)
где λ – отношение пиковых моментов к переключающим моментам

Из системы (17) вытекает:
 (18)
(18)
где m – число ступеней пускового резистора (m=3).
 (19)
(19)
Из условий пуска:
 (20)
(20)
Окончательно получаем:
 (21)
(21)
Подставляя числовые значения, получим:
 .
.
Значение минимального момента в относительных единицах:

Определим значения моментов в именованных единицах:

Сопротивление пусковых резисторов:
 (22)
(22)
В именованных единицах, Ом:
После окончания пуска двигатель работает по естественной схеме, при номинальном напряжении и отсутствии резисторов в цепях обмоток двигателя. Торможение двигателя происходит за счет включения в якорную цепь тормозного сопротивления rт, Ом:
 (23)
(23)
где Iдоп. – максимальный допустимый ток (при кратности тока Iдоп*.=2, 0), А.
Пусковая диаграмма, а также естественная и искусственные характеристики построены на рисунке 3. Там же построена диаграмма динамического торможения. Построения будем проводить в относительных единицах. В общем случае естественные и искусственные механические характеристики можно построить по выражению:
где R* - сопротивление цепи двигателя. 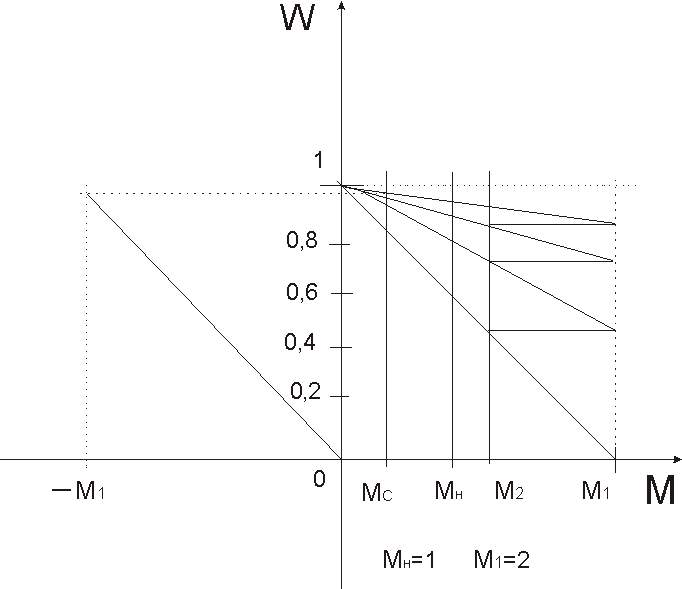
Рисунок 3