Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Электропривод крановых механизмов. 28.10.2013.
|
|
1. Краны мостовые.
2. Краны козловые.
3. Кран-балки.
4. Тельферы.
 Относиться к механизмам циклического действия. Работает в режиме S3 с большой частотой включений. Работают часто в запылённых и влажных помещениях или на открытом воздухе при резких изменениях температуры. Как правило все кранные механизмы оборудованы специальным приводом. На пример в мостовых кранах 3 привода (мост, тележка, лебёдка). Механизмы подъема передвижения ограничены конечными выключателями. Двигатели защищаются от перегрузок максимальными токовыми реле. Тепловая защита не применяется, так как может давать ложные срабатывания при частых пусках.
Относиться к механизмам циклического действия. Работает в режиме S3 с большой частотой включений. Работают часто в запылённых и влажных помещениях или на открытом воздухе при резких изменениях температуры. Как правило все кранные механизмы оборудованы специальным приводом. На пример в мостовых кранах 3 привода (мост, тележка, лебёдка). Механизмы подъема передвижения ограничены конечными выключателями. Двигатели защищаются от перегрузок максимальными токовыми реле. Тепловая защита не применяется, так как может давать ложные срабатывания при частых пусках.
Все крановые механизмы имеют тормоза. Кинематические схемы тормозом (рисунок 12.4)
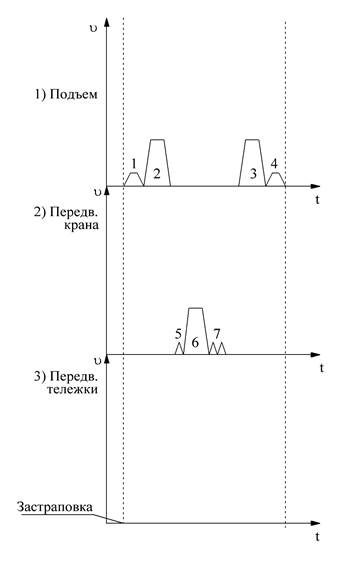
Все (КМ) имеют типовые циклограммы. (рисунок 12.3)
1. Обтяг груза.
2. Подъем груза и крюка.
3. Спуск груза и крюка.
4. Посадка груза и крюка.
5. Гашение раскачки.
6. Перемещение крана.
7. Наведение крана.
У крановых механизмов имеется 2 вида статических нагрузок:
1. Потенциальные.
2. Реактивные. Обусловленные силами трения.
При спуске сила трения зависит от веса и от скорости и момент приведённый к валу двигателя 

Если груз лёгкий, то при спуске может быть следующие:  (рис 12.5)
(рис 12.5)
По условию регулирования скорости система управления краном бывает 3х видов:
1. Регулирование  скорости ниже номинальной
скорости ниже номинальной  .
.
2. Регулирование скорости выше и ниже номинальной .
3. Регулирование ускорения и замедления.
До сих пор в нашей стране используется релейно-контактное управление. Например (рис 12.13.)
Самая простая:
а) с кнопочными постами.
б) с силовыми кулачковыми контроллерами.
в) сложные комплексные устройства (магнитный контроллер с преобразователем энергии или без него).
Недостаток релейно-контактных схем: Износ контактов.
В качестве двигателей может использоваться:
1. Двигатель постоянного тока.
2. АД с короткозамкнутым ротором.
3. АД с фазным ротором.
Если не используется современное частотное управление, то с точки зрения плавности управление лучше ДПТ. Второй по плавности АД с фазным ротором (ступенчатое регулирование скорости).
Наиболее предпочтительные механические характеристики для крановых механизмов. (рис 12.6)
1. 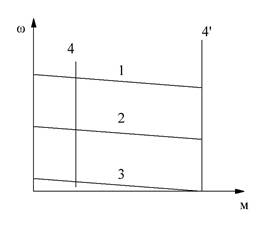 Подъем груза с номинальной скоростью.
Подъем груза с номинальной скоростью.
2. С пониженной скоростью.
3. Обеспечивает точную остановку и посадку груза.
4. Для разгона и торможения при постоянном моменте.
На сегодняшний день, как правило, для крановых механизмов применяется векторное управление, которое позволяет реализовать любые типичные механические характеристики и любые циклограммы.
Нагрузки крановых механизмов.
Не смотря на большое многообразие крановых установок их рабочие движение реализуется ограниченным числом однотипных механизмов; Поэтому к обычному приводу (не частотному) предъявляются следующие требования:
Для механизмов передвижения моста: регулирование скорости должно обеспечиваться достаточно в широком диапазоне.
Управляемость D=2-3.

Как правило применяется ступенчатое регулирование.
Механизмов подъема и перемещения тележки регулирование скорости, как правило, не предъявляются. Привод должен обеспечивать ограничение момента двигателя допустимыми значениями и снижение динамических нагрузок обусловленных упругими связями.
Нагрузки делятся на:
1. Статические 
 – масса грузозахватного устройства.
– масса грузозахватного устройства.
 — масса груза.
— масса груза.
 – диаметр барабана лебёдки.
– диаметр барабана лебёдки.
 – кратность полиспаста.
– кратность полиспаста.
 – передаточное число редуктора.
– передаточное число редуктора.
 — КПД передачи.
— КПД передачи.
2. Динамические 
 - расчётное ускорение.
- расчётное ускорение.