Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Требования, предъявляемые к электроприводу. Классификация электроприводов.
|
|
Понятие электропривода. Основные понятия. Обобщенная структура электропривода.
Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного и управляющих устройств, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением.
 силовой канал,
силовой канал,
 управляющий канал,
управляющий канал,
 обратные связи.
обратные связи.
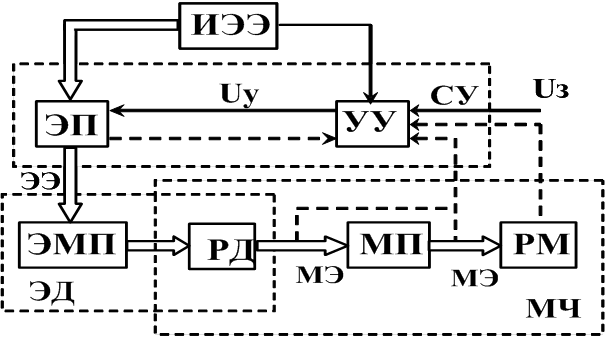 ИЭЭ – источник электрической энергии;
ИЭЭ – источник электрической энергии;
СУ – система управления;
УУ – управляющее устройство;
ЭП – силовая часть электропривода;
ЭЭ – электрическая энергия;
ЭД – электродвигатель;
ЭМП – Электромеханический преобразователь;
РД – ротор двигателя;
МЭ – механическая энергия;
МП – механический преобразователь;
РМ – рабочая машина;
МЧ – механическая часть;
Uз - напряжение задания;
Uу - напряжение управления.
Электрический привод всегда имеет 2 канала: силовой и информационный
- по первому каналу преобразуется энергия,
- по второму каналу сигналы управления и обратной связи.
Силовой канал состоит из электрической и механической части.
Требования, предъявляемые к электроприводу. Классификация электроприводов.
Общие требования к ЭП:
1. Надежность. ЭП должен обеспечить выполнение заданных функций в оговоренное время.
2. Точность. ЭП должен обеспечить отклонение какого-либо показателя движения от заданного допустимого значения.
3. Быстродействие. Способность системы реагировать на управляющие и возмущающие воздействия в заданный период времени.
4. Качество динамики. ЭП должен обеспечить протекание переходных процессов за заданный промежуток времени и с ограничением (при необходимости) различных фазовых координат.
5. Энергоемкость. Удельный расход электроэнергии на получение конечного результата, КПД.
Классификация ЭП:
1. По виду движения:
а) вращательного движения;
б) поступательного;
в) возвратно-поступательного;
Могут быть реверсивные и нереверсивные, носить непрерывный или дискретный харкт.
2. По принципам регулирования скорости и положения:
а) нерегулируемый (постоянная скорость);
б) регулируемый(воздействие на скорость ЭП);
в) следящий (производится перемещение в соответствии с задающим сигналом);
г) программно-управляемый (перемещение в соответствии с заданной программой);
д)адаптивный (автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
е) позиционный (обеспечивает регулирование положения исполнительного органа рабочей машины).
3. По роду механического преобразователя:
а) редукторный электропривод;
б) безредукторный.
4. По роду электрического преобразователя:
а) вентильный электропривод включает ионный и полупроводниковый, который может иметь тиристорный или транзисторный преобразователи;
б) система управляемый выпрямитель - двигатель (регулируемый выпрямитель - двигатель постоянного тока);
в) система генератор - двигатель (двигатель постоянного тока);
г) система преобразователь частоты – двигатель(двигатель переменного тока)
5. По способу передачи механической энергии исполнительному органу:
а) индивидуальный (каждый исполнительный орган рабочей машины приводится в движение отдельным двигателем) основной вид привода;
б) взаимосвязанный (два или несколько электрически или механически связанных электродвигателей);
в) групповой (от одного двигателя приводится в движение несколько машин).
6. По роду тока: постоянного тока, переменного тока.