Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Основные типы регуляторов. Выбор параметров регуляторов по общепромышленной методике
|
|
Выбор параметров регуляторов по общепромышленной методике
Определяются параметры неизменяемой части контура, т.е. коэффициент передачи и постоянные времени.
Неизменяемая часть – двигатель, преобразователь, датчик скорости.
В общем случае неизменяемая часть: исполнительный элемент, объект регулирования, датчик ОС.
WНЧ =  - передаточная функция неизменяемой части
- передаточная функция неизменяемой части
В некоторых случаях одно из звеньев интегратор (например, контур регулирования положения).
WНЧ =  , П – произведение
, П – произведение
Основные типы регуляторов и их настройка по общепромышленной методике
Регулятор – последовательное корректирующее устройство, обеспечивающее оптимизацию быстродействия и устойчивости контура с ООС.
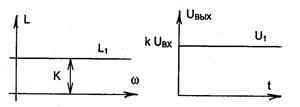
 1 Пропорциональный регулятор
1 Пропорциональный регулятор
ЛАЧХ П-регулятора Переходная функция П-регулятора
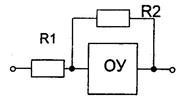
Во входной цепи и в канале обратной связи усилителя включены резисторы R1 и R2.
WP =  = k, WP – передаточная функция П-регулятора.
= k, WP – передаточная функция П-регулятора.
Величину коэффициента усиления регулятора к можно изменить с помощью сопротивлений R1 и R2.
Преимущество: высокое быстродействие.
Недостаток: наличие статической ошибки регулирования
WР = 
Тmax = наибольшая постоянная времени в неизменяемой части
Тμ – все остальные Т кроме максимальной Т
 - коэффициент П-регулятора
- коэффициент П-регулятора
2 Интегральный регулятор

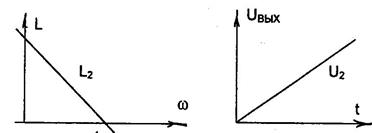
ЛАЧХ И-регулятора Переходная функция И-регулятора
Достоинства: высокая точность – при 0-ой ошибке регулирования можно получить любое выходное напряжение.
Недостатки: время быстродействия необходимо t на перезаряд С, отстающая фазовая характеристика jИ = -90°, поэтому настройка контуров регулирования в интеграторе в НЧ невозможна:  – система неустойчива.
– система неустойчива.
 ;
;
 ;
;
LЯЦ ≥ 4, 4  (мГн)
(мГн)
ТИ =  = RВХСОС
= RВХСОС
Быстродействие контура с ИР ниже, чем с ПР (wС на участке нулевого наклона), но чувствительность к изменениям параметров системы меньше, так как смещение характеристики приводит к пропроциональному изменению wС. Разомкнуть систему невозможно.
3 Пропорционально-интегральный регулятор
Регулятор объединяет положительные свойства пропорционального и интегрального звеньев: быстродействие на уровне пропорционального, точность - интегрального.
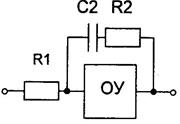

ЛАЧХ ПИ-регулятора Переходная функция ПИ-регулятора
ω ПИ =  ; WПИ =
; WПИ =  =
=  ;
;  =
= 
Коэффициент 2…4 при расчете ω П и ω ПИ должен быть одинаковым (настройка на симметричный оптимум по модулю.
С точки зрения максимального быстродействия применяют настройку на симметричный оптимум по фазе или по модулю.
Оптимум по фазе обеспечивает максимальное быстродействие системы при выбранном запасе устойчивости. В приближённых расчётах можно пользоваться настройкой на симметричный оптимум по модулю, когда wср располагается в середине участка единичного наклона контурной ЛЧХ. Для этого достаточно выбрать коэффициент 2 ¸ 4 при расчёте к и wср одинаковыми.