Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Способы формирования прямоугольной диаграммы тока якоря.
|
|
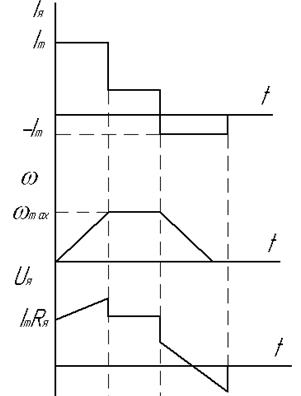
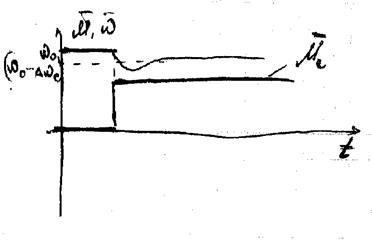
ДПТ НВ – объект регулирования. В большинстве систем требуется формирование тормозного режима.
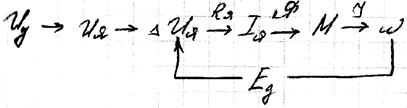
Uя = Iя Rя + кФω
Допущения: двигатель на ХХ и не учитывается индуктивность якорной цепи, хотя время нарастания тока ограничивается индуктивностью.
Прямоугольная диаграмма тока обеспечивает защиту двигателя от перегрузок по току якоря и нагреву, и механической части от динамических нагрузок и превышении ускорений в пуско-тормозных режимах.
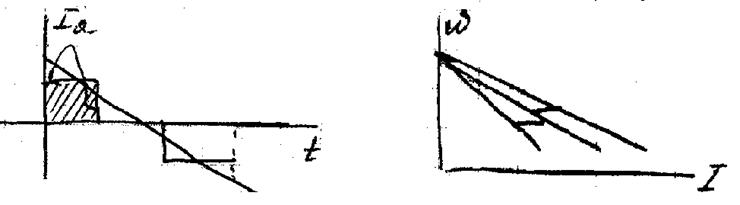
Прямоугольная диаграмма тока якоря обеспечивает максимально полное использование двигателя. Для двигателя, работающего в повторно - кратковременном режиме в особо тяжелых условиях (ПВ ≈ 100%, повышенная t°) оптимальной является треугольная диаграмма токов (min нагрева), однако, реализация такой диаграммы подразумевает не стабилизацию тока, а изменение его по заданному закону, что требует неунифицированных узлов.
Погрешность в случае эквивалентного треугольника – 10-12%.
Для формирования прямоугольной диаграммы тока применяются прямые и косвенные методы.
Прямой – отрицательная обратная связь по току якоря с пропорционально-интегральным регулятором.
Косвенный - отрицательная обратная связь по скорости и интегральный задатчик интенсивности.
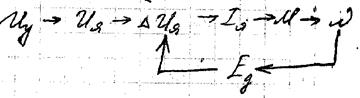
На вход w подается требуемое ускорение. На выходе задатчик интенсивности, формируется задание скорости с изменением закона.
Пропорционально-интегральный задатчик и обратная связь по напряжению или ЭДС преобразователя. Сложно обеспечить соответствие настройки w и реальных параметров двигателя. Например: сопротивление якоря.
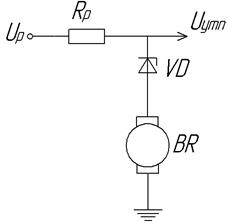
Стабилизация падения напряжения якоря
BR – тахогенератор
Входящее напряжение тиристорного преобразователя Uутп с помощью стабилитрона VD ограничено относительно напряжения датчика скорости BR – тахогенератора
Uутп < UVD + UBR
При подаче большого сигнала система регулирования Uр падения напряжения на якоре ограничивается напряжением пробоя стабилитрона.
Uя ≤ Iя Rя+ кФω
Узел применяется в приводах в качестве элемента защиты от перегрузки по току в переходных режимах.
Структурная схема с ООС по току якоря
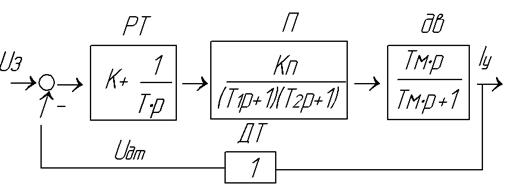
РТ – регулятор тока; ДТ – датчик тока; П – преобразователь; Дв – двигатель
Пропорциональный канал обеспечивает быстродействие и устойчивость контура регулирования, интегральный – точность в установившемся режиме. Выбор параметров обычно проводится по общепромышленной методике, при этом частота сопряжения П и И
ω сопр =  =
=  - частота среза контура.
- частота среза контура.
10)Способы стабилизации скорости
Задачи: ограничение тока, формирование пуска и тормозных режимов, поддержание скорости.
 Сравнение систем стабилизации скорости проводится по переходному процессу, падении скорости и изменении нагрузки.
Сравнение систем стабилизации скорости проводится по переходному процессу, падении скорости и изменении нагрузки.
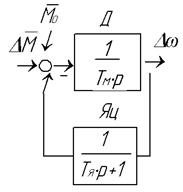
Тм =  , Тя =
, Тя = 
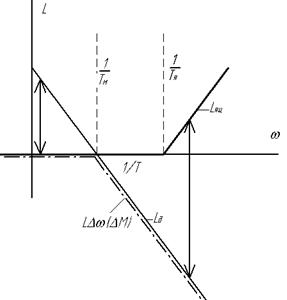
∆ ω = ∆ Мс, в относит. единицах
∆ ω = ω о  , рад/с
, рад/с
∆ ω д = ∆ Мскакδ
Время п.п: tппп = 3, 14·Тm·m
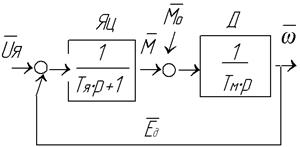
Переходный процесс в двигателе без системы регулирования зависит от соотношения постоянных Тя и Тм
Если Тм > 4Тя контур устойчив, переходный процесс – экспонента, время переходного процесса 3, 14·Тm
При малых запасах устойчивости возникает перерегулирование и колебания.
Способы стабилизации скорости:
Определяется параметром, в зависимости от которого производится регулирование.
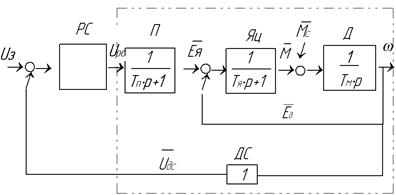
1 Отрицательная обратная связь по скорости.
Требуется установка датчика скорости (тахогенератора), импульсного датчика.
В высокоточных приводах применяется специальный двигатель со встроенным тахогенератором (точность измерения скорости до 0, 1%). Импульсные и цифровые датчики применяются в микропроцессорных системах. Основная проблема – дискретность обработки информации и связанные с этим проблемы.
 неизменяемая часть показана штрихом
неизменяемая часть показана штрихом
Регулятор скорости в зависимости от точности выбирается: пропорциональный или пропорционально-интегральный регулятор.
При настройке контура регулятора скорости обратная связь по ЭДС обычно отбрасывают, т.к. при скоростях, близких 0, она практически не работает, частота среза контура саморегулирования очень низка и в целом обратная связь по ЭДС – стабилизирующая.
2 В системах с ОС по ЭДС исключается относительно не надежный тахогенератор, проблемы соосности и пульсации выходного сигнала датчика скорости, однако точность стабилизации скорости снижается за счет изменения сопротивления якоря (температура) и потока возбуждения при колебаниях напряжения сети. В высокоточных приводах с ОС по ЭДС ток возбуждения стабилизируется с помощью дополнительного контура. В цифровых системах датчик скорости строится как измеритель частоты или периода. При измерении частоты подсчитывается число импульсов с датчика за фиксированное время. Запаздывание датчика постоянное, погрешность зависит от частоты вращения и особенно велика на низких частотах. При измерении периода подсчитывается количество импульсов опорного генератора в промежутке между импульсами датчика. Запаздывание зависит от частоты вращения, погрешность максимальна на высоких скоростях.
В системах с низкими требованиями по точности применяется ОС по напряжению. Скорость двигателя стабилизируется на уровне естественной механической характеристики двигателя. Устойчивость контура напряжения и быстродействие большие, обычно применяются интегральные регуляторы.
3 Схема с ПОС по току
Применяется относительно редко из-за сложности настройки. При высоком быстродействии контура регулирования полная компенсация скоростной ошибки возможна при использовании регуляторов с дифференцирующим каналом. Дифференциальный канал позволяет получить опережающую фазовую характеристику и повысить запас устойчивости системы. Частота среза должна находиться в центре участка положительного наклона.
Недостатки Диф. регуляторов: сложность настройки, большое количество регулировочных элементов, низкая помехозащищенность (обязательна установка фильтра).