Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Физическая сторона задачи.
|
|
Мы установили статические (1) и геометрические (2 а) зависимости. Для того, чтобы согласовать их между собой, воспользуемся законом Гука (какова деформация, такова сила, à какова сила, такова деформация).
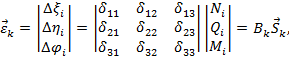
Где элементы  матрицы
матрицы  есть абсолютные деформации по направлению m обобщенной силы, вызыванные действием единичной обобщенной силы в n направлении.
есть абсолютные деформации по направлению m обобщенной силы, вызыванные действием единичной обобщенной силы в n направлении.
Рассмотрим схему стержня, эквивалентную заданной:
| Ni |
Qi lk F2=Qi
F3=Mi


При действии продольной силы  стержень удлиняется на
стержень удлиняется на  , т.к.
, т.к.

При действии поперечной силы  стержень изгибается, образуя прогиб и угол поворота.
стержень изгибается, образуя прогиб и угол поворота.

|

|


При действии изгибающего момента  стержень так же изгибается, образуя прогибы и угол поворота.
стержень так же изгибается, образуя прогибы и угол поворота.


|

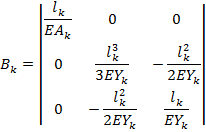
Матрица Bk принимает вид:
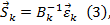
Закон Гука можно записать в прямой форме (какова деформация, такова сила):
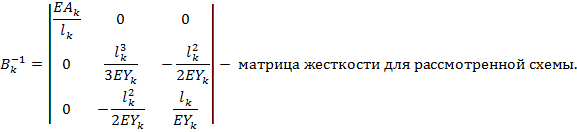
 где обратная матрица
где обратная матрица  имеет вид:
имеет вид:
Подставим зависимость (3) и (2 а) в (1) ( ) и получим:
) и получим:

Где  - матрица жесткости для k стержня, имеющего узлы i, j. В развернутом виде матрицу жесткости стержня для случая α =0 (
- матрица жесткости для k стержня, имеющего узлы i, j. В развернутом виде матрицу жесткости стержня для случая α =0 ( ) можно записать так:
) можно записать так:

Анализ отдельно взятого стержня закончен. Можно переходить к синтезу, т.е. к рассмотрению всей системы в целом. Исходные данные следующие:
1. Координаты узлов системы – геометрическая информация;
2. Жесткости поперечных сечений стержней – физическая информация;
3. Стержневая связь между узлами – топологическая информация;
4. Внешние нагрузки – статическая информация.
Требуется определить:
1. Усилия  во всех стрежнях;
во всех стрежнях;
2. Перемещения  всех узлов.
всех узлов.
Обозначим:  – вектор узловых нагрузок системы;
– вектор узловых нагрузок системы;
 - вектор внутренних усилий системы;
- вектор внутренних усилий системы;
 - вектор узловых перемещений системы;
- вектор узловых перемещений системы;
 - вектор абсолютных деформаций системы;
- вектор абсолютных деформаций системы;
А – матрица равновесия системы;
В – матрица податливости системы;
R – матрица жесткости системы.
Для поставленной задачи имеем:
1. Уравнения равновесия

2. Геометрические уравнения

3. Физические зависимости закона Гука
Так как в число неизвестных входят только усилия  и перемещения , то исключим из трех видов уравнений вектор деформации
и перемещения , то исключим из трех видов уравнений вектор деформации  . Подставим (а), (б), (в):
. Подставим (а), (б), (в):

Объединим уравнения (а) и (г) в одну систему:
 (д)
(д)
Матрица А имеет  строк и 3 S столбцов (u – число узлов, S – число стержней). Матрица
строк и 3 S столбцов (u – число узлов, S – число стержней). Матрица  имеет 3 S строк и столбцов.
имеет 3 S строк и столбцов.
Первое векторное уравнение содержит алгебраических уравнений с 3 S неизвестными, а второе векторное уравнение - 3 S алгебраических уравнений с неизвестными. Всего уравнений  ; число неизвестных так же равно
; число неизвестных так же равно  каждый узел имеет 3 перемещения, а каждый стержень 3 усилия.
каждый узел имеет 3 перемещения, а каждый стержень 3 усилия.
Выразим из второго векторного уравнения вектор усилий 


Подставим в первое векторное уравнение:

где  - матрица жесткости системы.
- матрица жесткости системы.
Решая уравнение с 3 u неизвестными  находим перемещения всех узлов системы:
находим перемещения всех узлов системы:

Затем вычисляем усилия во всех стержнях системы:
