Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Найпростіші моделі елементів механічних систем
|
|
При відносному переміщенні окремих елементів механічної системи на поверхні їх контакту виникають сили тертя, що перешкоджають цьому переміщенню. Для зменшення опору тертя до поверхні контакту підводять змащувальний матеріал. Тоді швидкість v ковзання однієї деталі відносно іншої в першому наближенні пропорційна прикладеній силі Р (рис. 8.6)
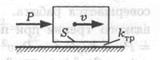
Рис. 8.6
тобто Р =  , де
, де  — коефіцієнт в’язкого тертя, S — площа поверхні контакту. Якщо в цьому випадку для механічної системи в якості потенційної величини вибрати силу Р, а якості потокової — швидкість v, то записану рівність можна розглядати як аналог формули (8.1) закону Ома
— коефіцієнт в’язкого тертя, S — площа поверхні контакту. Якщо в цьому випадку для механічної системи в якості потенційної величини вибрати силу Р, а якості потокової — швидкість v, то записану рівність можна розглядати як аналог формули (8.1) закону Ома
P = =  , (8.10)
, (8.10)
а величину RM = kтpS — як аналог електричного опору R. Оскільки основними одиницями виміру сили і швидкості є відповідно Н =  (ньютон) і м/с, то величину
(ньютон) і м/с, то величину  вимірюють в
вимірюють в  , а коефіцієнт в'язкого тертя — в
, а коефіцієнт в'язкого тертя — в  .
.
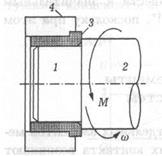
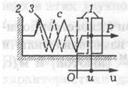
При обертанні, наприклад, цапфи 1 валу 2 відносно вкладиша 3 підшипники ковзання 4 (рис. 8.7) момент М, що обертає, прикладений до валу і вимірюваний в Н • м, можна вважати при в'язкому терті пропорційним кутової швидкості  (одиниця виміру рад/с).
(одиниця виміру рад/с).
|
Тоді замість (8.10) слід записати
M =  =
=  , (8.11)
, (8.11)
де d і l — діаметр та довжина цапфи. У цьому випадку момент М буде потенційною величиною, кутова швидкість — потоковою, а величина  , що вимірюється в Н • м • с — аналогом електричного
, що вимірюється в Н • м • с — аналогом електричного
Рис. 5.7 опору R в (8.1).
При русі проти сил опору в'язкого тертя здійснюється робота. Потужність, потрібна для подолання в'язкого тертя при поступальній ході, рівна WTp = Pv = kтpSv2 = Rмv2, а при обертальному — Wтp =  =
=
=  =
=  .Ця потужність є аналогом потужності тепловиділення на резисторі (див. 8.1).
.Ця потужність є аналогом потужності тепловиділення на резисторі (див. 8.1).
У технічних пристроях різного призначення механічний зв'язок між окремими деталями і агрегатами характеризують жорсткістю вузлів кріплення, під якою розуміють відношення сили, прикладеної до такого вузла, до переміщення точки додатка цій сили.
Найпростішою розрахунковою схемою в узла кріплення
|
деякої деталі 1 до нерухомої основи 2 є пружина 3 (рис. 8.8), один кінець якої приєднаний до цієї деталі, а інший — до основи. Жорсткістю пружини називають відношення,
с = Р/и, що вимірюється в Н/м = кг/с2, де Р — сила, яка
прикладена до пружини в точці її кріплення до
Рис. 5.8деталі, а и — переміщення цієї точки у напрямку дії сили.
Зміна в часі t сили Р приведе до зміни переміщення и. Якщо не враховувати сили інерції, що виникають при переміщенні витків пружини, і прийняти значення с постійним, то після диференціювання рівності и = Р/с за часом отримаємо
 (8.12)
(8.12)
де v — швидкість переміщення точки прикладання сили Р. В цьому випадку величину См = 1/ с, вимірювану в м/Н і яка називається податливості пружини, можна розглядати як аналог ємності З, що входить в співвідношення (8.3) для електричного конденсатора. При розтягуванні або стискуванні пружини вона нагромаджує потенційну енергію, рівну роботі сили Р, що здійснюється при переміщенні точки додатка цієї сили:
 .
.
Ця енергія є аналогом енергії електричного поля в конденсаторі (див. 8.1). Оскільки v = du/dt, I = dQe/dt і швидкість v — аналог сили електричного струму  , те переміщення и — аналог електричного заряду
, те переміщення и — аналог електричного заряду  .
.
Залежність вигляду (8.12) характерна для багатьох елементів, матеріал яких при вантаженні зберігає властивість лінійної пружності. Так, наприклад, подовжню деформацію лінійно пружного стержня з поперечним перетином площею S при розтягуванні силоміць Р можна вважати однаковою по всій довжині  стержня (рис. 8.9) і рівною відповідно до закону Гуку.
стержня (рис. 8.9) і рівною відповідно до закону Гуку.
 , де
, де  механічне напруження в поперечному перетині стрижня, Е — модуль пружності матеріалу
механічне напруження в поперечному перетині стрижня, Е — модуль пружності матеріалу
Рис.5.9 стрижня при розтягу (модуль Юнга), які вимірюються в
паскалях (Па = Н/м2). При цьому торець стрижню, що сприймає дію сили, переміститься відносно закріпленого торця на відстань і =  l = Pl/(ES).
l = Pl/(ES).
При порівняно повільній зміні в часі t сили Р, що дозволяє нехтувати силами інерції, отримаємо
 , (8.13)
, (8.13)
де величина  = l/(ES) є аналогом ємності З в (8.3). З курсу опору матеріалів відомо, що поперечна сила Р, яка прикладена до кінця
= l/(ES) є аналогом ємності З в (8.3). З курсу опору матеріалів відомо, що поперечна сила Р, яка прикладена до кінця
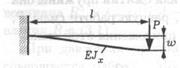
консольної пружної балки довжиною , що жорстко
|
закріплено іншим кінцем (рис. 8.10), викликає прогин w = P13/(3EJx), де Jx — геометричний момент інерції поперечного перетину балки відносно головної
Рис. 8.10 центральної вісі цього перетину, яка перпендикулярна площині згину, в який лежить нейтральна вісь балки та діє сила Р. Так, Jx =  для круглого перетину діаметру d і Jx =
для круглого перетину діаметру d і Jx =  для прямокутного перетину шириною b і висотою h. При зміні в часі t сили Р приходимо до залежності, аналогічної (8.12) і (8.13):
для прямокутного перетину шириною b і висотою h. При зміні в часі t сили Р приходимо до залежності, аналогічної (8.12) і (8.13):
 , (8.14)
, (8.14)
де  =
=  /(3EJx).
/(3EJx).
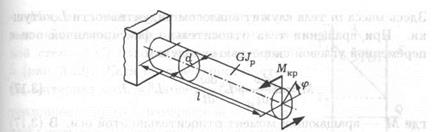
Рис. 8.11
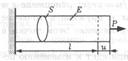
Якщо один з кінців пружного стержня завдовжки з круглим поперечним перетином діаметру d жорстко закріплений, а до другого прикладений обертальний момент Мкр (рис. 8.11), то кут закручування стержня буде  , де G — модуль зсуву матеріалу стержня
, де G — модуль зсуву матеріалу стержня
Jp =  - полярний момент інерції перетину стержня. Диференціюванням за часом t знаходимо
- полярний момент інерції перетину стержня. Диференціюванням за часом t знаходимо
 , (8.15)
, (8.15)
де  . При закручуванні стержня в (8.15) потенційній величиною є обертовий момент Мкр, а потоковою — кутова швидкість повороту того кінця стержня, до якого прикладений цей момент.
. При закручуванні стержня в (8.15) потенційній величиною є обертовий момент Мкр, а потоковою — кутова швидкість повороту того кінця стержня, до якого прикладений цей момент.
Таким чином, при різному виконанні пружних елементів механічної системи між швидкістю переміщення (або кутовою швидкістю) і швидкістю зміни прикладеної сили (або моменту, що крутить) справедлива залежність, аналогічна співвідношенню (8.3) для електричного конденсатора. Співвідношення, аналогічне (8.4) для індуктивної котушки, в разі поступальної ходи тіла масою т з швидкістю v, що змінюється у часі, виходить безпосередньо з другого закону Ньютона у вигляді
 ,
,  .(8.16)
.(8.16)
Тут маса т тіла служить аналогом індуктивності L котушки. При обертанні тіла відносно фіксованої осі із змінною кутовою швидкістю отримаємо
 , (8.17)
, (8.17)
де М — обертовий момент, відносно цієї осі. У (8.17) аналогом індуктивності є момент інерції J тіла відносно осі обертання. Кінетична енергія при поступальному русі рівна — К = mv2/ 2 =  , а при
, а при
обертовому — К = J  2/ 2 =
2/ 2 =  / 2. Величина К є аналогом енергії магнітного поля індуктивної котушки.
/ 2. Величина К є аналогом енергії магнітного поля індуктивної котушки.
Кількість руху (імпульс) тіла масою  , що має швидкість
, що має швидкість  , рівне mv, а момент кількості руху (момент імпульсу) тіла, що обертається, —
, рівне mv, а момент кількості руху (момент імпульсу) тіла, що обертається, —  . Продовжуючи аналогію з індуктивною котушкою, приходимо до висновку, що аналогом імпульсу при поступальній ході тіла або моменту імпульсу при обертанні тіла буде потокозчеплення
. Продовжуючи аналогію з індуктивною котушкою, приходимо до висновку, що аналогом імпульсу при поступальній ході тіла або моменту імпульсу при обертанні тіла буде потокозчеплення  котушки індуктивністю L, через яку протікає електричний струм силоміць I.
котушки індуктивністю L, через яку протікає електричний струм силоміць I.
Аналогію між математичними моделями (ММ) типових елементів механічних систем і електричних двополюсників називають електромеханічною. Її зручно використовувати при побудові ММ складних механічних систем, що складаються з великого числа елементів, які взаємодіють між собою.
Подібні аналогії існують між електричними і тепловими, електричними і гідравлічними системами та ін. Ці питання достатньо повно викладено в [1].
Основна ідея застосування методу застосування методу аналогій (електромеханічних, електрогідравличних, електротеплових та ін.) поляеає у тому, що фізичні процеси, які відбуваються у перелічених системах описуються близькими математичними співвідношеннями. Виходячи з цього, дослідження, наприклад, механічної системи можна замінити розглядом еквівалентної електричної системи, що в багатьох випадках є більш зручнішим.
Контрольні питання
1. Що мається на увазі під електричним двополюсником?
2. Привести основні рівняння стани, що характеризують прості елементи ланцюга?
3. Записати основні співвідношення для змінних струму
напруга і потужності на ділянках ланцюга, що містять
активні опори, ємності і індуктивності.
4. Записати комплексні вистави для струмів і напруги в електричних двополюсниках.
5. Привести аналог закону Ома для механічної системи.
6. Записати диференціальне рівняння для зміни обертового
моменту в пружному стержні, який закріплений одним кінцем.