Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Подвійність електромеханічної аналогії
|
|
При побудові математичних моделей (ММ) макрорівня порівняно простих механічних систем, що складаються з невеликої кількості типових елементів, зазвичай безпосередньо використовують основні закони механіки. Але для складнішої механічної системи, що включає велике число елементів, що взаємодіють між собою, зручніше, використовуючи електромеханічну аналогію, заздалегідь скласти еквівалентну схему, відповідну розрахунковій схемі цієї системи. Тоді при переході від еквівалентної схеми до ММ можна застосувати прийоми, розроблені і формалізовані для електричних ланцюгів.
Встановлений на основі ідентичності ММ типових елементів механічної системи і електричних двополюсників варіант електромеханічної аналогії (див. лекцію 8) не є єдиним, оскільки кожному з дуальних електричних ланцюгів можна поставити у відповідність свій варіант такої аналогії. У зв'язку з цим допустимо говорити про подвійність електромеханічної аналогії.
Як приклад переконаємося, що для механічної системи, що включає тіло 1 масою m, рухоме поступально по горизонтальній площині і пов'язане з нерухомою опорою 2 пружиною 3 жорсткістю с (рис. 9.2), еквівалентними схемами можуть бути обоє дуального ланцюга, представленого на рис. 9.1, а і б.
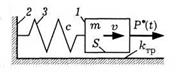
Рис. 6.2
Дійсно, відповідно до другого закону Ньютона, запишемо
 , (9.7)
, (9.7)
де и — переміщення тіла відносно положення рівноваги, v =  -
-
швидкість тіла, P*(t) — зовнішня сила, що прикладена до тіла і змінюється (у загальному випадку) в часі t, — коефіцієнт в'язкого тертя при русі тіла по горизонтальній площині, S — площа поверхні контакту тіла з цією площиною. Використовуючи введені в лекції 8 позначення
Rм =  , Cм =
, Cм =  і Lм =
і Lм =  , представимо (9.7) у вигляді
, представимо (9.7) у вигляді
 , (9.8)
, (9.8)
де  — деякий момент часу, прийнятий за початковий.
— деякий момент часу, прийнятий за початковий.
З порівняння (6.8) з (6.2) витікає, що ММ даної механічної системи і ММ електричного ланцюга, що зображено на рис. 9.1, а, ідентичні при виборі в механічній системі сили в якості потенційної величини, яка є аналогічною падінню електричної напруги, і швидкості в якості потокової величини, аналогічній силі електричного струму. Такий вибір і був зроблений (див. лекцію 8), що визначає I - ий варіант електромеханічної аналогії (таблиця. 9.2). Але якщо в механічній системі потенційною величиною вибрати швидкість, а в якості потокової — силу, то ММ цієї системи у вигляді (9.8) буде ідентична ММ електричного ланцюга, що представлено на рис. 9.1, б. Насправді, вважаючи  = Rм =
= Rм =  S,
S,
 = CМ = 1 /с і
= CМ = 1 /с і  = Lм = m, замість (9.8) отримуємо
= Lм = m, замість (9.8) отримуємо
 , (9.9)
, (9.9)
що з точністю до позначень збігається з (9.4) і визначає II варіант електромеханічної аналогії (див. таблицю 9.2).
Використання II варіанту електромеханічної аналогії зручніше при побудові еквівалентної схеми механічної системи, оскільки для цього варіанту отримують природне механічне тлумачення законів Кирхгофа, використовувані потім при переході від еквівалентної схеми до ММ системи. В разі поступальної ходи механічної системи перший закон Кирхгофа буде аналогом рівняння рівноваги всіх сил (включаючи інерційні), що діють на вузол еквівалентної схеми, який розглядається, а другий — аналогом правила складання швидкостей при обході контуру цієї схеми. При просторовому русі механічної системи сили і швидкості є векторними величинами. Тому рівність, яка слідує із законів Кирхгофа, має бути виконана для проекцій цих величин на кожну з координатних осей.
Таблиця 9.2
